Pose computation overview
The pose computation problem [Marchand16] consists in solving for the rotation and translation that minimizes the reprojection error from 3D-2D point correspondences.
The solvePnP and related functions estimate the object pose given a set of object points, their corresponding image projections, as well as the camera intrinsic matrix and the distortion coefficients, see the figure below (more precisely, the X-axis of the camera frame is pointing to the right, the Y-axis downward and the Z-axis forward).
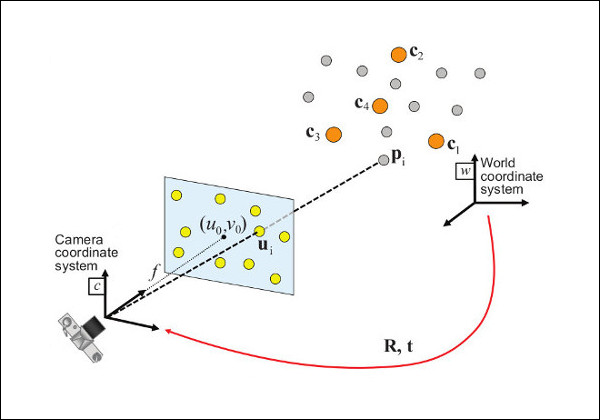
Points expressed in the world frame \( \bf{X}_w \) are projected into the image plane \( \left[ u, v \right] \) using the perspective projection model \( \Pi \) and the camera intrinsic parameters matrix \( \bf{A} \) (also denoted \( \bf{K} \) in the literature):
\[ \begin{align*} \begin{bmatrix} u \\ v \\ 1 \end{bmatrix} &= \bf{A} \hspace{0.1em} \Pi \hspace{0.2em} ^{c}\bf{T}_w \begin{bmatrix} X_{w} \\ Y_{w} \\ Z_{w} \\ 1 \end{bmatrix} \\ \begin{bmatrix} u \\ v \\ 1 \end{bmatrix} &= \begin{bmatrix} f_x & 0 & c_x \\ 0 & f_y & c_y \\ 0 & 0 & 1 \end{bmatrix} \begin{bmatrix} 1 & 0 & 0 & 0 \\ 0 & 1 & 0 & 0 \\ 0 & 0 & 1 & 0 \end{bmatrix} \begin{bmatrix} r_{11} & r_{12} & r_{13} & t_x \\ r_{21} & r_{22} & r_{23} & t_y \\ r_{31} & r_{32} & r_{33} & t_z \\ 0 & 0 & 0 & 1 \end{bmatrix} \begin{bmatrix} X_{w} \\ Y_{w} \\ Z_{w} \\ 1 \end{bmatrix} \end{align*} \]
The estimated pose is thus the rotation (rvec) and the translation (tvec) vectors that allow transforming a 3D point expressed in the world frame into the camera frame:
\[ \begin{align*} \begin{bmatrix} X_c \\ Y_c \\ Z_c \\ 1 \end{bmatrix} &= \hspace{0.2em} ^{c}\bf{T}_w \begin{bmatrix} X_{w} \\ Y_{w} \\ Z_{w} \\ 1 \end{bmatrix} \\ \begin{bmatrix} X_c \\ Y_c \\ Z_c \\ 1 \end{bmatrix} &= \begin{bmatrix} r_{11} & r_{12} & r_{13} & t_x \\ r_{21} & r_{22} & r_{23} & t_y \\ r_{31} & r_{32} & r_{33} & t_z \\ 0 & 0 & 0 & 1 \end{bmatrix} \begin{bmatrix} X_{w} \\ Y_{w} \\ Z_{w} \\ 1 \end{bmatrix} \end{align*} \]
Pose computation methods
Refer to the cv::SolvePnPMethod enum documentation for the list of possible values. Some details about each method are described below:
- cv::SOLVEPNP_ITERATIVE Iterative method is based on a Levenberg-Marquardt optimization. In this case the function finds such a pose that minimizes reprojection error, that is the sum of squared distances between the observed projections "imagePoints" and the projected (using cv::projectPoints ) "objectPoints". Initial solution for non-planar "objectPoints" needs at least 6 points and uses the DLT algorithm. Initial solution for planar "objectPoints" needs at least 4 points and uses pose from homography decomposition.
- cv::SOLVEPNP_P3P Method is based on the paper of X.S. Gao, X.-R. Hou, J. Tang, H.-F. Chang "Complete Solution Classification for the Perspective-Three-Point Problem" ([gao2003complete]). In this case the function requires exactly four object and image points.
- cv::SOLVEPNP_AP3P Method is based on the paper of T. Ke, S. Roumeliotis "An Efficient Algebraic Solution to the Perspective-Three-Point Problem" ([Ke17]). In this case the function requires exactly four object and image points.
- cv::SOLVEPNP_EPNP Method has been introduced by F. Moreno-Noguer, V. Lepetit and P. Fua in the paper "EPnP: Efficient Perspective-n-Point Camera Pose Estimation" ([lepetit2009epnp]).
- cv::SOLVEPNP_DLS Broken implementation. Using this flag will fallback to EPnP.
Method is based on the paper of J. Hesch and S. Roumeliotis. "A Direct Least-Squares (DLS) Method for PnP" ([hesch2011direct]). - cv::SOLVEPNP_UPNP Broken implementation. Using this flag will fallback to EPnP.
Method is based on the paper of A. Penate-Sanchez, J. Andrade-Cetto, F. Moreno-Noguer. "Exhaustive Linearization for Robust Camera Pose and Focal Length Estimation" ([penate2013exhaustive]). In this case the function also estimates the parameters \(f_x\) and \(f_y\) assuming that both have the same value. Then the cameraMatrix is updated with the estimated focal length. - cv::SOLVEPNP_IPPE Method is based on the paper of T. Collins and A. Bartoli. "Infinitesimal Plane-Based Pose Estimation" ([Collins14]). This method requires coplanar object points.
- cv::SOLVEPNP_IPPE_SQUARE Method is based on the paper of Toby Collins and Adrien Bartoli. "Infinitesimal Plane-Based Pose Estimation" ([Collins14]). This method is suitable for marker pose estimation. It requires 4 coplanar object points defined in the following order:
- point 0: [-squareLength / 2, squareLength / 2, 0]
- point 1: [ squareLength / 2, squareLength / 2, 0]
- point 2: [ squareLength / 2, -squareLength / 2, 0]
- point 3: [-squareLength / 2, -squareLength / 2, 0]
- cv::SOLVEPNP_SQPNP Method is based on the paper "A Consistently Fast and Globally Optimal Solution to the Perspective-n-Point Problem" by G. Terzakis and M.Lourakis ([Terzakis2020SQPnP]). It requires 3 or more points.
P3P
The cv::solveP3P() computes an object pose from exactly 3 3D-2D point correspondences. A P3P problem has up to 4 solutions.
- Note
- The solutions are sorted by reprojection errors (lowest to highest).
PnP
The cv::solvePnP() returns the rotation and the translation vectors that transform a 3D point expressed in the object coordinate frame to the camera coordinate frame, using different methods:
- P3P methods (cv::SOLVEPNP_P3P, cv::SOLVEPNP_AP3P): need 4 input points to return a unique solution.
- cv::SOLVEPNP_IPPE Input points must be >= 4 and object points must be coplanar.
- cv::SOLVEPNP_IPPE_SQUARE Special case suitable for marker pose estimation. Number of input points must be 4. Object points must be defined in the following order:
- point 0: [-squareLength / 2, squareLength / 2, 0]
- point 1: [ squareLength / 2, squareLength / 2, 0]
- point 2: [ squareLength / 2, -squareLength / 2, 0]
- point 3: [-squareLength / 2, -squareLength / 2, 0]
- for all the other flags, number of input points must be >= 4 and object points can be in any configuration.
Generic PnP
The cv::solvePnPGeneric() allows retrieving all the possible solutions.
Currently, only cv::SOLVEPNP_P3P, cv::SOLVEPNP_AP3P, cv::SOLVEPNP_IPPE, cv::SOLVEPNP_IPPE_SQUARE, cv::SOLVEPNP_SQPNP can return multiple solutions.
RANSAC PnP
The cv::solvePnPRansac() computes the object pose wrt. the camera frame using a RANSAC scheme to deal with outliers.
More information can be found in [Zuliani2014RANSACFD]
Pose refinement
Pose refinement consists in estimating the rotation and translation that minimizes the reprojection error using a non-linear minimization method and starting from an initial estimate of the solution. OpenCV proposes cv::solvePnPRefineLM() and cv::solvePnPRefineVVS() for this problem.
cv::solvePnPRefineLM() uses a non-linear Levenberg-Marquardt minimization scheme [Madsen04] [Eade13] and the current implementation computes the rotation update as a perturbation and not on SO(3).
cv::solvePnPRefineVVS() uses a Gauss-Newton non-linear minimization scheme [Marchand16] and with an update of the rotation part computed using the exponential map.
- Note
- at least three 3D-2D point correspondences are necessary.
