Image Segmentation with Distance Transform and Watershed Algorithm
Table of Contents
Prev Tutorial: Point Polygon Test
Next Tutorial: Out-of-focus Deblur Filter
| Original author | Theodore Tsesmelis |
| Compatibility | OpenCV >= 3.0 |
Goal
In this tutorial you will learn how to:
- Use the OpenCV function cv::filter2D in order to perform some laplacian filtering for image sharpening
- Use the OpenCV function cv::distanceTransform in order to obtain the derived representation of a binary image, where the value of each pixel is replaced by its distance to the nearest background pixel
- Use the OpenCV function cv::watershed in order to isolate objects in the image from the background
Theory
Code
C++
This tutorial code's is shown lines below. You can also download it from here.
#include <opencv2/core.hpp>
#include <opencv2/imgproc.hpp>
#include <opencv2/highgui.hpp>
#include <iostream>
using namespace std;
using namespace cv;
int main(int argc, char *argv[])
{
// Load the image
CommandLineParser parser( argc, argv, "{@input | cards.png | input image}" );
if( src.empty() )
{
cout << "Could not open or find the image!\n" << endl;
cout << "Usage: " << argv[0] << " <Input image>" << endl;
return -1;
}
// Show the source image
imshow("Source Image", src);
// Change the background from white to black, since that will help later to extract
// better results during the use of Distance Transform
Mat mask;
// Show output image
imshow("Black Background Image", src);
// Create a kernel that we will use to sharpen our image
Mat kernel = (Mat_<float>(3,3) <<
1, 1, 1,
1, -8, 1,
1, 1, 1); // an approximation of second derivative, a quite strong kernel
// do the laplacian filtering as it is
// well, we need to convert everything in something more deeper then CV_8U
// because the kernel has some negative values,
// and we can expect in general to have a Laplacian image with negative values
// BUT a 8bits unsigned int (the one we are working with) can contain values from 0 to 255
// so the possible negative number will be truncated
Mat imgLaplacian;
filter2D(src, imgLaplacian, CV_32F, kernel);
Mat sharp;
Mat imgResult = sharp - imgLaplacian;
// convert back to 8bits gray scale
imgLaplacian.convertTo(imgLaplacian, CV_8UC3);
// imshow( "Laplace Filtered Image", imgLaplacian );
imshow( "New Sharped Image", imgResult );
// Create binary image from source image
Mat bw;
cvtColor(imgResult, bw, COLOR_BGR2GRAY);
threshold(bw, bw, 40, 255, THRESH_BINARY | THRESH_OTSU);
imshow("Binary Image", bw);
// Perform the distance transform algorithm
Mat dist;
distanceTransform(bw, dist, DIST_L2, 3);
// Normalize the distance image for range = {0.0, 1.0}
// so we can visualize and threshold it
normalize(dist, dist, 0, 1.0, NORM_MINMAX);
imshow("Distance Transform Image", dist);
// Threshold to obtain the peaks
// This will be the markers for the foreground objects
threshold(dist, dist, 0.4, 1.0, THRESH_BINARY);
// Dilate a bit the dist image
dilate(dist, dist, kernel1);
imshow("Peaks", dist);
// Create the CV_8U version of the distance image
// It is needed for findContours()
Mat dist_8u;
// Find total markers
vector<vector<Point> > contours;
findContours(dist_8u, contours, RETR_EXTERNAL, CHAIN_APPROX_SIMPLE);
// Create the marker image for the watershed algorithm
// Draw the foreground markers
for (size_t i = 0; i < contours.size(); i++)
{
}
// Draw the background marker
Mat markers8u;
imshow("Markers", markers8u);
// Perform the watershed algorithm
watershed(imgResult, markers);
Mat mark;
bitwise_not(mark, mark);
// imshow("Markers_v2", mark); // uncomment this if you want to see how the mark
// image looks like at that point
// Generate random colors
vector<Vec3b> colors;
for (size_t i = 0; i < contours.size(); i++)
{
int b = theRNG().uniform(0, 256);
int g = theRNG().uniform(0, 256);
int r = theRNG().uniform(0, 256);
}
// Create the result image
// Fill labeled objects with random colors
{
{
if (index > 0 && index <= static_cast<int>(contours.size()))
{
}
}
}
// Visualize the final image
imshow("Final Result", dst);
waitKey();
return 0;
}
Mat & setTo(InputArray value, InputArray mask=noArray())
Sets all or some of the array elements to the specified value.
int rows
the number of rows and columns or (-1, -1) when the matrix has more than 2 dimensions
Definition: mat.hpp:2137
void convertTo(OutputArray m, int rtype, double alpha=1, double beta=0) const
Converts an array to another data type with optional scaling.
int uniform(int a, int b)
returns uniformly distributed integer random number from [a,b) range
void imshow(const String &winname, InputArray mat)
Displays an image in the specified window.
"black box" representation of the file storage associated with a file on disk.
Definition: core.hpp:106
STL namespace.
Java
This tutorial code's is shown lines below. You can also download it from here
import java.util.ArrayList;
import java.util.List;
import java.util.Random;
import org.opencv.core.Core;
import org.opencv.core.CvType;
import org.opencv.core.Mat;
import org.opencv.core.MatOfPoint;
import org.opencv.core.Point;
import org.opencv.core.Scalar;
import org.opencv.highgui.HighGui;
import org.opencv.imgcodecs.Imgcodecs;
import org.opencv.imgproc.Imgproc;
class ImageSegmentation {
public void run(String[] args) {
// Load the image
String filename = args.length > 0 ? args[0] : "../data/cards.png";
Mat srcOriginal = Imgcodecs.imread(filename);
if (srcOriginal.empty()) {
System.err.println("Cannot read image: " + filename);
System.exit(0);
}
// Show source image
HighGui.imshow("Source Image", srcOriginal);
// Change the background from white to black, since that will help later to
// extract
// better results during the use of Distance Transform
Mat src = srcOriginal.clone();
byte[] srcData = new byte[(int) (src.total() * src.channels())];
src.get(0, 0, srcData);
for (int i = 0; i < src.rows(); i++) {
for (int j = 0; j < src.cols(); j++) {
if (srcData[(i * src.cols() + j) * 3] == (byte) 255 && srcData[(i * src.cols() + j) * 3 + 1] == (byte) 255
&& srcData[(i * src.cols() + j) * 3 + 2] == (byte) 255) {
srcData[(i * src.cols() + j) * 3] = 0;
srcData[(i * src.cols() + j) * 3 + 1] = 0;
srcData[(i * src.cols() + j) * 3 + 2] = 0;
}
}
}
src.put(0, 0, srcData);
// Show output image
HighGui.imshow("Black Background Image", src);
// Create a kernel that we will use to sharpen our image
Mat kernel = new Mat(3, 3, CvType.CV_32F);
// an approximation of second derivative, a quite strong kernel
float[] kernelData = new float[(int) (kernel.total() * kernel.channels())];
kernelData[0] = 1; kernelData[1] = 1; kernelData[2] = 1;
kernelData[3] = 1; kernelData[4] = -8; kernelData[5] = 1;
kernelData[6] = 1; kernelData[7] = 1; kernelData[8] = 1;
kernel.put(0, 0, kernelData);
// do the laplacian filtering as it is
// well, we need to convert everything in something more deeper then CV_8U
// because the kernel has some negative values,
// and we can expect in general to have a Laplacian image with negative values
// BUT a 8bits unsigned int (the one we are working with) can contain values
// from 0 to 255
// so the possible negative number will be truncated
Mat imgLaplacian = new Mat();
Imgproc.filter2D(src, imgLaplacian, CvType.CV_32F, kernel);
Mat sharp = new Mat();
src.convertTo(sharp, CvType.CV_32F);
Mat imgResult = new Mat();
Core.subtract(sharp, imgLaplacian, imgResult);
// convert back to 8bits gray scale
imgResult.convertTo(imgResult, CvType.CV_8UC3);
imgLaplacian.convertTo(imgLaplacian, CvType.CV_8UC3);
// imshow( "Laplace Filtered Image", imgLaplacian );
HighGui.imshow("New Sharped Image", imgResult);
// Create binary image from source image
Mat bw = new Mat();
Imgproc.cvtColor(imgResult, bw, Imgproc.COLOR_BGR2GRAY);
Imgproc.threshold(bw, bw, 40, 255, Imgproc.THRESH_BINARY | Imgproc.THRESH_OTSU);
HighGui.imshow("Binary Image", bw);
// Perform the distance transform algorithm
Mat dist = new Mat();
Imgproc.distanceTransform(bw, dist, Imgproc.DIST_L2, 3);
// Normalize the distance image for range = {0.0, 1.0}
// so we can visualize and threshold it
Core.normalize(dist, dist, 0.0, 1.0, Core.NORM_MINMAX);
Mat distDisplayScaled = new Mat();
Core.multiply(dist, new Scalar(255), distDisplayScaled);
Mat distDisplay = new Mat();
distDisplayScaled.convertTo(distDisplay, CvType.CV_8U);
HighGui.imshow("Distance Transform Image", distDisplay);
// Threshold to obtain the peaks
// This will be the markers for the foreground objects
Imgproc.threshold(dist, dist, 0.4, 1.0, Imgproc.THRESH_BINARY);
// Dilate a bit the dist image
Mat kernel1 = Mat.ones(3, 3, CvType.CV_8U);
Imgproc.dilate(dist, dist, kernel1);
Mat distDisplay2 = new Mat();
dist.convertTo(distDisplay2, CvType.CV_8U);
Core.multiply(distDisplay2, new Scalar(255), distDisplay2);
HighGui.imshow("Peaks", distDisplay2);
// Create the CV_8U version of the distance image
// It is needed for findContours()
Mat dist_8u = new Mat();
dist.convertTo(dist_8u, CvType.CV_8U);
// Find total markers
List<MatOfPoint> contours = new ArrayList<>();
Mat hierarchy = new Mat();
Imgproc.findContours(dist_8u, contours, hierarchy, Imgproc.RETR_EXTERNAL, Imgproc.CHAIN_APPROX_SIMPLE);
// Create the marker image for the watershed algorithm
Mat markers = Mat.zeros(dist.size(), CvType.CV_32S);
// Draw the foreground markers
for (int i = 0; i < contours.size(); i++) {
Imgproc.drawContours(markers, contours, i, new Scalar(i + 1), -1);
}
// Draw the background marker
Mat markersScaled = new Mat();
markers.convertTo(markersScaled, CvType.CV_32F);
Core.normalize(markersScaled, markersScaled, 0.0, 255.0, Core.NORM_MINMAX);
Mat markersDisplay = new Mat();
markersScaled.convertTo(markersDisplay, CvType.CV_8U);
HighGui.imshow("Markers", markersDisplay);
// Perform the watershed algorithm
Imgproc.watershed(imgResult, markers);
Mat mark = Mat.zeros(markers.size(), CvType.CV_8U);
markers.convertTo(mark, CvType.CV_8UC1);
Core.bitwise_not(mark, mark);
// imshow("Markers_v2", mark); // uncomment this if you want to see how the mark
// image looks like at that point
// Generate random colors
Random rng = new Random(12345);
List<Scalar> colors = new ArrayList<>(contours.size());
for (int i = 0; i < contours.size(); i++) {
int b = rng.nextInt(256);
int g = rng.nextInt(256);
int r = rng.nextInt(256);
colors.add(new Scalar(b, g, r));
}
// Create the result image
Mat dst = Mat.zeros(markers.size(), CvType.CV_8UC3);
byte[] dstData = new byte[(int) (dst.total() * dst.channels())];
dst.get(0, 0, dstData);
// Fill labeled objects with random colors
int[] markersData = new int[(int) (markers.total() * markers.channels())];
markers.get(0, 0, markersData);
for (int i = 0; i < markers.rows(); i++) {
for (int j = 0; j < markers.cols(); j++) {
int index = markersData[i * markers.cols() + j];
if (index > 0 && index <= contours.size()) {
dstData[(i * dst.cols() + j) * 3 + 0] = (byte) colors.get(index - 1).val[0];
dstData[(i * dst.cols() + j) * 3 + 1] = (byte) colors.get(index - 1).val[1];
dstData[(i * dst.cols() + j) * 3 + 2] = (byte) colors.get(index - 1).val[2];
} else {
dstData[(i * dst.cols() + j) * 3 + 0] = 0;
dstData[(i * dst.cols() + j) * 3 + 1] = 0;
dstData[(i * dst.cols() + j) * 3 + 2] = 0;
}
}
}
dst.put(0, 0, dstData);
// Visualize the final image
HighGui.imshow("Final Result", dst);
HighGui.waitKey();
System.exit(0);
}
}
public class ImageSegmentationDemo {
public static void main(String[] args) {
// Load the native OpenCV library
System.loadLibrary(Core.NATIVE_LIBRARY_NAME);
new ImageSegmentation().run(args);
}
}
Python
This tutorial code's is shown lines below. You can also download it from here
from __future__ import print_function
import cv2 as cv
import numpy as np
import argparse
import random as rng
rng.seed(12345)
parser = argparse.ArgumentParser(description='Code for Image Segmentation with Distance Transform and Watershed Algorithm.\
Sample code showing how to segment overlapping objects using Laplacian filtering, \
in addition to Watershed and Distance Transformation')
parser.add_argument('--input', help='Path to input image.', default='cards.png')
args = parser.parse_args()
src = cv.imread(cv.samples.findFile(args.input))
if src is None:
print('Could not open or find the image:', args.input)
exit(0)
# Show source image
cv.imshow('Source Image', src)
src[np.all(src == 255, axis=2)] = 0
# Show output image
cv.imshow('Black Background Image', src)
kernel = np.array([[1, 1, 1], [1, -8, 1], [1, 1, 1]], dtype=np.float32)
# do the laplacian filtering as it is
# well, we need to convert everything in something more deeper then CV_8U
# because the kernel has some negative values,
# and we can expect in general to have a Laplacian image with negative values
# BUT a 8bits unsigned int (the one we are working with) can contain values from 0 to 255
# so the possible negative number will be truncated
imgLaplacian = cv.filter2D(src, cv.CV_32F, kernel)
sharp = np.float32(src)
imgResult = sharp - imgLaplacian
# convert back to 8bits gray scale
imgResult = np.clip(imgResult, 0, 255)
imgResult = imgResult.astype('uint8')
imgLaplacian = np.clip(imgLaplacian, 0, 255)
imgLaplacian = np.uint8(imgLaplacian)
#cv.imshow('Laplace Filtered Image', imgLaplacian)
cv.imshow('New Sharped Image', imgResult)
bw = cv.cvtColor(imgResult, cv.COLOR_BGR2GRAY)
_, bw = cv.threshold(bw, 40, 255, cv.THRESH_BINARY | cv.THRESH_OTSU)
cv.imshow('Binary Image', bw)
dist = cv.distanceTransform(bw, cv.DIST_L2, 3)
# Normalize the distance image for range = {0.0, 1.0}
# so we can visualize and threshold it
cv.normalize(dist, dist, 0, 1.0, cv.NORM_MINMAX)
cv.imshow('Distance Transform Image', dist)
_, dist = cv.threshold(dist, 0.4, 1.0, cv.THRESH_BINARY)
# Dilate a bit the dist image
kernel1 = np.ones((3,3), dtype=np.uint8)
dist = cv.dilate(dist, kernel1)
cv.imshow('Peaks', dist)
dist_8u = dist.astype('uint8')
# Find total markers
contours, _ = cv.findContours(dist_8u, cv.RETR_EXTERNAL, cv.CHAIN_APPROX_SIMPLE)
# Create the marker image for the watershed algorithm
markers = np.zeros(dist.shape, dtype=np.int32)
# Draw the foreground markers
for i in range(len(contours)):
cv.drawContours(markers, contours, i, (i+1), -1)
# Draw the background marker
cv.circle(markers, (5,5), 3, (255,255,255), -1)
markers_8u = (markers * 10).astype('uint8')
cv.imshow('Markers', markers_8u)
cv.watershed(imgResult, markers)
#mark = np.zeros(markers.shape, dtype=np.uint8)
mark = markers.astype('uint8')
mark = cv.bitwise_not(mark)
# uncomment this if you want to see how the mark
# image looks like at that point
#cv.imshow('Markers_v2', mark)
# Generate random colors
colors = []
for contour in contours:
colors.append((rng.randint(0,256), rng.randint(0,256), rng.randint(0,256)))
# Create the result image
dst = np.zeros((markers.shape[0], markers.shape[1], 3), dtype=np.uint8)
# Fill labeled objects with random colors
for i in range(markers.shape[0]):
for j in range(markers.shape[1]):
index = markers[i,j]
if index > 0 and index <= len(contours):
dst[i,j,:] = colors[index-1]
# Visualize the final image
cv.imshow('Final Result', dst)
void bitwise_not(InputArray src, OutputArray dst, InputArray mask=noArray())
Inverts every bit of an array.
void normalize(InputArray src, InputOutputArray dst, double alpha=1, double beta=0, int norm_type=NORM_L2, int dtype=-1, InputArray mask=noArray())
Normalizes the norm or value range of an array.
cv::String findFile(const cv::String &relative_path, bool required=true, bool silentMode=false)
Try to find requested data file.
CV_EXPORTS_W Mat imread(const String &filename, int flags=IMREAD_COLOR)
Loads an image from a file.
void cvtColor(InputArray src, OutputArray dst, int code, int dstCn=0)
Converts an image from one color space to another.
void drawContours(InputOutputArray image, InputArrayOfArrays contours, int contourIdx, const Scalar &color, int thickness=1, int lineType=LINE_8, InputArray hierarchy=noArray(), int maxLevel=INT_MAX, Point offset=Point())
Draws contours outlines or filled contours.
void circle(InputOutputArray img, Point center, int radius, const Scalar &color, int thickness=1, int lineType=LINE_8, int shift=0)
Draws a circle.
void filter2D(InputArray src, OutputArray dst, int ddepth, InputArray kernel, Point anchor=Point(-1,-1), double delta=0, int borderType=BORDER_DEFAULT)
Convolves an image with the kernel.
void dilate(InputArray src, OutputArray dst, InputArray kernel, Point anchor=Point(-1,-1), int iterations=1, int borderType=BORDER_CONSTANT, const Scalar &borderValue=morphologyDefaultBorderValue())
Dilates an image by using a specific structuring element.
void distanceTransform(InputArray src, OutputArray dst, OutputArray labels, int distanceType, int maskSize, int labelType=DIST_LABEL_CCOMP)
Calculates the distance to the closest zero pixel for each pixel of the source image.
double threshold(InputArray src, OutputArray dst, double thresh, double maxval, int type)
Applies a fixed-level threshold to each array element.
void watershed(InputArray image, InputOutputArray markers)
Performs a marker-based image segmentation using the watershed algorithm.
void findContours(InputArray image, OutputArrayOfArrays contours, OutputArray hierarchy, int mode, int method, Point offset=Point())
Finds contours in a binary image.
Explanation / Result
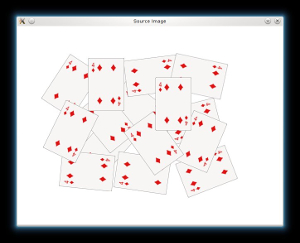
- Load the source image and check if it is loaded without any problem, then show it:
C++
// Load the image
CommandLineParser parser( argc, argv, "{@input | cards.png | input image}" );
if( src.empty() )
{
cout << "Could not open or find the image!\n" << endl;
cout << "Usage: " << argv[0] << " <Input image>" << endl;
return -1;
}
// Show the source image
imshow("Source Image", src);
Java
// Load the image
String filename = args.length > 0 ? args[0] : "../data/cards.png";
Mat srcOriginal = Imgcodecs.imread(filename);
if (srcOriginal.empty()) {
System.err.println("Cannot read image: " + filename);
System.exit(0);
}
// Show source image
HighGui.imshow("Source Image", srcOriginal);
Python
# Load the image
parser = argparse.ArgumentParser(description='Code for Image Segmentation with Distance Transform and Watershed Algorithm.\
Sample code showing how to segment overlapping objects using Laplacian filtering, \
in addition to Watershed and Distance Transformation')
parser.add_argument('--input', help='Path to input image.', default='cards.png')
args = parser.parse_args()
src = cv.imread(cv.samples.findFile(args.input))
if src is None:
print('Could not open or find the image:', args.input)
exit(0)
# Show source image
cv.imshow('Source Image', src)
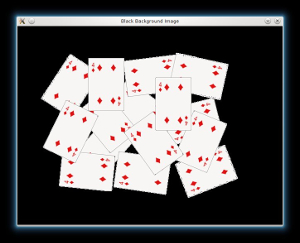
- Then if we have an image with a white background, it is good to transform it to black. This will help us to discriminate the foreground objects easier when we will apply the Distance Transform:
C++
// Change the background from white to black, since that will help later to extract
// better results during the use of Distance Transform
Mat mask;
// Show output image
imshow("Black Background Image", src);
Java
// Change the background from white to black, since that will help later to
// extract
// better results during the use of Distance Transform
Mat src = srcOriginal.clone();
byte[] srcData = new byte[(int) (src.total() * src.channels())];
src.get(0, 0, srcData);
for (int i = 0; i < src.rows(); i++) {
for (int j = 0; j < src.cols(); j++) {
if (srcData[(i * src.cols() + j) * 3] == (byte) 255 && srcData[(i * src.cols() + j) * 3 + 1] == (byte) 255
&& srcData[(i * src.cols() + j) * 3 + 2] == (byte) 255) {
srcData[(i * src.cols() + j) * 3] = 0;
srcData[(i * src.cols() + j) * 3 + 1] = 0;
srcData[(i * src.cols() + j) * 3 + 2] = 0;
}
}
}
src.put(0, 0, srcData);
// Show output image
HighGui.imshow("Black Background Image", src);
Python
# Change the background from white to black, since that will help later to extract
# better results during the use of Distance Transform
src[np.all(src == 255, axis=2)] = 0
# Show output image
cv.imshow('Black Background Image', src)
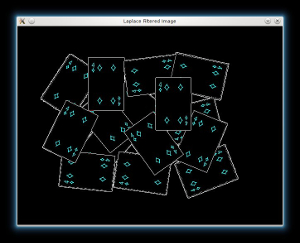
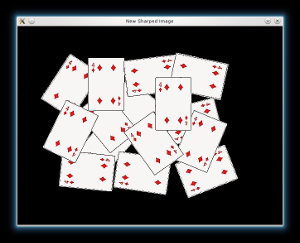
- Afterwards we will sharpen our image in order to acute the edges of the foreground objects. We will apply a laplacian filter with a quite strong filter (an approximation of second derivative):
C++
// Create a kernel that we will use to sharpen our image
Mat kernel = (Mat_<float>(3,3) <<
1, 1, 1,
1, -8, 1,
1, 1, 1); // an approximation of second derivative, a quite strong kernel
// do the laplacian filtering as it is
// well, we need to convert everything in something more deeper then CV_8U
// because the kernel has some negative values,
// and we can expect in general to have a Laplacian image with negative values
// BUT a 8bits unsigned int (the one we are working with) can contain values from 0 to 255
// so the possible negative number will be truncated
Mat imgLaplacian;
filter2D(src, imgLaplacian, CV_32F, kernel);
Mat sharp;
Mat imgResult = sharp - imgLaplacian;
// convert back to 8bits gray scale
imgLaplacian.convertTo(imgLaplacian, CV_8UC3);
// imshow( "Laplace Filtered Image", imgLaplacian );
imshow( "New Sharped Image", imgResult );
Java
// Create a kernel that we will use to sharpen our image
Mat kernel = new Mat(3, 3, CvType.CV_32F);
// an approximation of second derivative, a quite strong kernel
float[] kernelData = new float[(int) (kernel.total() * kernel.channels())];
kernelData[0] = 1; kernelData[1] = 1; kernelData[2] = 1;
kernelData[3] = 1; kernelData[4] = -8; kernelData[5] = 1;
kernelData[6] = 1; kernelData[7] = 1; kernelData[8] = 1;
kernel.put(0, 0, kernelData);
// do the laplacian filtering as it is
// well, we need to convert everything in something more deeper then CV_8U
// because the kernel has some negative values,
// and we can expect in general to have a Laplacian image with negative values
// BUT a 8bits unsigned int (the one we are working with) can contain values
// from 0 to 255
// so the possible negative number will be truncated
Mat imgLaplacian = new Mat();
Imgproc.filter2D(src, imgLaplacian, CvType.CV_32F, kernel);
Mat sharp = new Mat();
src.convertTo(sharp, CvType.CV_32F);
Mat imgResult = new Mat();
Core.subtract(sharp, imgLaplacian, imgResult);
// convert back to 8bits gray scale
imgResult.convertTo(imgResult, CvType.CV_8UC3);
imgLaplacian.convertTo(imgLaplacian, CvType.CV_8UC3);
// imshow( "Laplace Filtered Image", imgLaplacian );
HighGui.imshow("New Sharped Image", imgResult);
Python
# Create a kernel that we will use to sharpen our image
# an approximation of second derivative, a quite strong kernel
kernel = np.array([[1, 1, 1], [1, -8, 1], [1, 1, 1]], dtype=np.float32)
# do the laplacian filtering as it is
# well, we need to convert everything in something more deeper then CV_8U
# because the kernel has some negative values,
# and we can expect in general to have a Laplacian image with negative values
# BUT a 8bits unsigned int (the one we are working with) can contain values from 0 to 255
# so the possible negative number will be truncated
imgLaplacian = cv.filter2D(src, cv.CV_32F, kernel)
sharp = np.float32(src)
imgResult = sharp - imgLaplacian
# convert back to 8bits gray scale
imgResult = np.clip(imgResult, 0, 255)
imgResult = imgResult.astype('uint8')
imgLaplacian = np.clip(imgLaplacian, 0, 255)
imgLaplacian = np.uint8(imgLaplacian)
#cv.imshow('Laplace Filtered Image', imgLaplacian)
cv.imshow('New Sharped Image', imgResult)
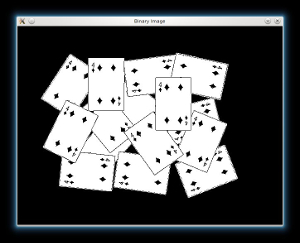
- Now we transform our new sharpened source image to a grayscale and a binary one, respectively:
C++
// Create binary image from source image
Mat bw;
cvtColor(imgResult, bw, COLOR_BGR2GRAY);
threshold(bw, bw, 40, 255, THRESH_BINARY | THRESH_OTSU);
imshow("Binary Image", bw);
Java
// Create binary image from source image
Mat bw = new Mat();
Imgproc.cvtColor(imgResult, bw, Imgproc.COLOR_BGR2GRAY);
Imgproc.threshold(bw, bw, 40, 255, Imgproc.THRESH_BINARY | Imgproc.THRESH_OTSU);
HighGui.imshow("Binary Image", bw);
Python
# Create binary image from source image
bw = cv.cvtColor(imgResult, cv.COLOR_BGR2GRAY)
_, bw = cv.threshold(bw, 40, 255, cv.THRESH_BINARY | cv.THRESH_OTSU)
cv.imshow('Binary Image', bw)
- We are ready now to apply the Distance Transform on the binary image. Moreover, we normalize the output image in order to be able visualize and threshold the result:
C++
// Perform the distance transform algorithm
Mat dist;
distanceTransform(bw, dist, DIST_L2, 3);
// Normalize the distance image for range = {0.0, 1.0}
// so we can visualize and threshold it
normalize(dist, dist, 0, 1.0, NORM_MINMAX);
imshow("Distance Transform Image", dist);
Java
// Perform the distance transform algorithm
Mat dist = new Mat();
Imgproc.distanceTransform(bw, dist, Imgproc.DIST_L2, 3);
// Normalize the distance image for range = {0.0, 1.0}
// so we can visualize and threshold it
Core.normalize(dist, dist, 0.0, 1.0, Core.NORM_MINMAX);
Mat distDisplayScaled = new Mat();
Core.multiply(dist, new Scalar(255), distDisplayScaled);
Mat distDisplay = new Mat();
distDisplayScaled.convertTo(distDisplay, CvType.CV_8U);
HighGui.imshow("Distance Transform Image", distDisplay);
Python
# Perform the distance transform algorithm
dist = cv.distanceTransform(bw, cv.DIST_L2, 3)
# Normalize the distance image for range = {0.0, 1.0}
# so we can visualize and threshold it
cv.normalize(dist, dist, 0, 1.0, cv.NORM_MINMAX)
cv.imshow('Distance Transform Image', dist)
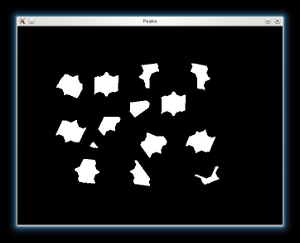
- We threshold the dist image and then perform some morphology operation (i.e. dilation) in order to extract the peaks from the above image:
C++
Java
// Threshold to obtain the peaks
// This will be the markers for the foreground objects
Imgproc.threshold(dist, dist, 0.4, 1.0, Imgproc.THRESH_BINARY);
// Dilate a bit the dist image
Mat kernel1 = Mat.ones(3, 3, CvType.CV_8U);
Imgproc.dilate(dist, dist, kernel1);
Mat distDisplay2 = new Mat();
dist.convertTo(distDisplay2, CvType.CV_8U);
Core.multiply(distDisplay2, new Scalar(255), distDisplay2);
HighGui.imshow("Peaks", distDisplay2);
Python
# Threshold to obtain the peaks
# This will be the markers for the foreground objects
_, dist = cv.threshold(dist, 0.4, 1.0, cv.THRESH_BINARY)
# Dilate a bit the dist image
kernel1 = np.ones((3,3), dtype=np.uint8)
dist = cv.dilate(dist, kernel1)
cv.imshow('Peaks', dist)
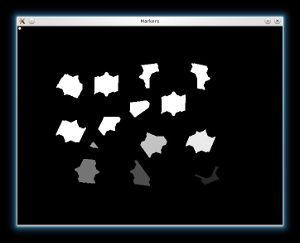
- From each blob then we create a seed/marker for the watershed algorithm with the help of the cv::findContours function:
C++
// Create the CV_8U version of the distance image
// It is needed for findContours()
Mat dist_8u;
// Find total markers
vector<vector<Point> > contours;
findContours(dist_8u, contours, RETR_EXTERNAL, CHAIN_APPROX_SIMPLE);
// Create the marker image for the watershed algorithm
// Draw the foreground markers
for (size_t i = 0; i < contours.size(); i++)
{
}
// Draw the background marker
Mat markers8u;
imshow("Markers", markers8u);
Java
// Create the CV_8U version of the distance image
// It is needed for findContours()
Mat dist_8u = new Mat();
dist.convertTo(dist_8u, CvType.CV_8U);
// Find total markers
List<MatOfPoint> contours = new ArrayList<>();
Mat hierarchy = new Mat();
Imgproc.findContours(dist_8u, contours, hierarchy, Imgproc.RETR_EXTERNAL, Imgproc.CHAIN_APPROX_SIMPLE);
// Create the marker image for the watershed algorithm
Mat markers = Mat.zeros(dist.size(), CvType.CV_32S);
// Draw the foreground markers
for (int i = 0; i < contours.size(); i++) {
Imgproc.drawContours(markers, contours, i, new Scalar(i + 1), -1);
}
// Draw the background marker
Mat markersScaled = new Mat();
markers.convertTo(markersScaled, CvType.CV_32F);
Core.normalize(markersScaled, markersScaled, 0.0, 255.0, Core.NORM_MINMAX);
Imgproc.circle(markersScaled, new Point(5, 5), 3, new Scalar(255, 255, 255), -1);
Mat markersDisplay = new Mat();
markersScaled.convertTo(markersDisplay, CvType.CV_8U);
HighGui.imshow("Markers", markersDisplay);
Imgproc.circle(markers, new Point(5, 5), 3, new Scalar(255, 255, 255), -1);
Python
# Create the CV_8U version of the distance image
# It is needed for findContours()
dist_8u = dist.astype('uint8')
# Find total markers
contours, _ = cv.findContours(dist_8u, cv.RETR_EXTERNAL, cv.CHAIN_APPROX_SIMPLE)
# Create the marker image for the watershed algorithm
markers = np.zeros(dist.shape, dtype=np.int32)
# Draw the foreground markers
for i in range(len(contours)):
cv.drawContours(markers, contours, i, (i+1), -1)
# Draw the background marker
cv.circle(markers, (5,5), 3, (255,255,255), -1)
markers_8u = (markers * 10).astype('uint8')
cv.imshow('Markers', markers_8u)
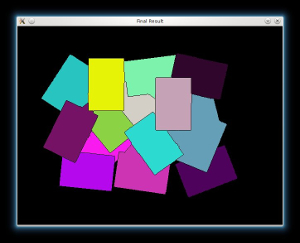
- Finally, we can apply the watershed algorithm, and visualize the result:
C++
// Perform the watershed algorithm
watershed(imgResult, markers);
Mat mark;
bitwise_not(mark, mark);
// imshow("Markers_v2", mark); // uncomment this if you want to see how the mark
// image looks like at that point
// Generate random colors
vector<Vec3b> colors;
for (size_t i = 0; i < contours.size(); i++)
{
int b = theRNG().uniform(0, 256);
int g = theRNG().uniform(0, 256);
int r = theRNG().uniform(0, 256);
}
// Create the result image
// Fill labeled objects with random colors
{
{
if (index > 0 && index <= static_cast<int>(contours.size()))
{
}
}
}
// Visualize the final image
imshow("Final Result", dst);
Java
// Perform the watershed algorithm
Imgproc.watershed(imgResult, markers);
Mat mark = Mat.zeros(markers.size(), CvType.CV_8U);
markers.convertTo(mark, CvType.CV_8UC1);
Core.bitwise_not(mark, mark);
// imshow("Markers_v2", mark); // uncomment this if you want to see how the mark
// image looks like at that point
// Generate random colors
Random rng = new Random(12345);
List<Scalar> colors = new ArrayList<>(contours.size());
for (int i = 0; i < contours.size(); i++) {
int b = rng.nextInt(256);
int g = rng.nextInt(256);
int r = rng.nextInt(256);
colors.add(new Scalar(b, g, r));
}
// Create the result image
Mat dst = Mat.zeros(markers.size(), CvType.CV_8UC3);
byte[] dstData = new byte[(int) (dst.total() * dst.channels())];
dst.get(0, 0, dstData);
// Fill labeled objects with random colors
int[] markersData = new int[(int) (markers.total() * markers.channels())];
markers.get(0, 0, markersData);
for (int i = 0; i < markers.rows(); i++) {
for (int j = 0; j < markers.cols(); j++) {
int index = markersData[i * markers.cols() + j];
if (index > 0 && index <= contours.size()) {
dstData[(i * dst.cols() + j) * 3 + 0] = (byte) colors.get(index - 1).val[0];
dstData[(i * dst.cols() + j) * 3 + 1] = (byte) colors.get(index - 1).val[1];
dstData[(i * dst.cols() + j) * 3 + 2] = (byte) colors.get(index - 1).val[2];
} else {
dstData[(i * dst.cols() + j) * 3 + 0] = 0;
dstData[(i * dst.cols() + j) * 3 + 1] = 0;
dstData[(i * dst.cols() + j) * 3 + 2] = 0;
}
}
}
dst.put(0, 0, dstData);
// Visualize the final image
HighGui.imshow("Final Result", dst);
Python
# Perform the watershed algorithm
cv.watershed(imgResult, markers)
#mark = np.zeros(markers.shape, dtype=np.uint8)
mark = markers.astype('uint8')
mark = cv.bitwise_not(mark)
# uncomment this if you want to see how the mark
# image looks like at that point
#cv.imshow('Markers_v2', mark)
# Generate random colors
colors = []
for contour in contours:
colors.append((rng.randint(0,256), rng.randint(0,256), rng.randint(0,256)))
# Create the result image
dst = np.zeros((markers.shape[0], markers.shape[1], 3), dtype=np.uint8)
# Fill labeled objects with random colors
for i in range(markers.shape[0]):
for j in range(markers.shape[1]):
index = markers[i,j]
if index > 0 and index <= len(contours):
dst[i,j,:] = colors[index-1]
# Visualize the final image
cv.imshow('Final Result', dst)