Enumerations | |
| enum | cv::MorphShapes { cv::MORPH_RECT = 0 , cv::MORPH_CROSS = 1 , cv::MORPH_ELLIPSE = 2 } |
| shape of the structuring element More... | |
| enum | cv::MorphTypes { cv::MORPH_ERODE = 0 , cv::MORPH_DILATE = 1 , cv::MORPH_OPEN = 2 , cv::MORPH_CLOSE = 3 , cv::MORPH_GRADIENT = 4 , cv::MORPH_TOPHAT = 5 , cv::MORPH_BLACKHAT = 6 , cv::MORPH_HITMISS = 7 } |
| type of morphological operation More... | |
| enum | cv::SpecialFilter { cv::FILTER_SCHARR = -1 } |
Functions | |
| void | cv::bilateralFilter (InputArray src, OutputArray dst, int d, double sigmaColor, double sigmaSpace, int borderType=BORDER_DEFAULT) |
| Applies the bilateral filter to an image. | |
| void | cv::blur (InputArray src, OutputArray dst, Size ksize, Point anchor=Point(-1,-1), int borderType=BORDER_DEFAULT) |
| Blurs an image using the normalized box filter. | |
| void | cv::boxFilter (InputArray src, OutputArray dst, int ddepth, Size ksize, Point anchor=Point(-1,-1), bool normalize=true, int borderType=BORDER_DEFAULT) |
| Blurs an image using the box filter. | |
| void | cv::buildPyramid (InputArray src, OutputArrayOfArrays dst, int maxlevel, int borderType=BORDER_DEFAULT) |
| Constructs the Gaussian pyramid for an image. | |
| void | cv::dilate (InputArray src, OutputArray dst, InputArray kernel, Point anchor=Point(-1,-1), int iterations=1, int borderType=BORDER_CONSTANT, const Scalar &borderValue=morphologyDefaultBorderValue()) |
| Dilates an image by using a specific structuring element. | |
| void | cv::erode (InputArray src, OutputArray dst, InputArray kernel, Point anchor=Point(-1,-1), int iterations=1, int borderType=BORDER_CONSTANT, const Scalar &borderValue=morphologyDefaultBorderValue()) |
| Erodes an image by using a specific structuring element. | |
| void | cv::filter2D (InputArray src, OutputArray dst, int ddepth, InputArray kernel, Point anchor=Point(-1,-1), double delta=0, int borderType=BORDER_DEFAULT) |
| Convolves an image with the kernel. | |
| void | cv::GaussianBlur (InputArray src, OutputArray dst, Size ksize, double sigmaX, double sigmaY=0, int borderType=BORDER_DEFAULT) |
| Blurs an image using a Gaussian filter. | |
| void | cv::getDerivKernels (OutputArray kx, OutputArray ky, int dx, int dy, int ksize, bool normalize=false, int ktype=CV_32F) |
| Returns filter coefficients for computing spatial image derivatives. | |
| Mat | cv::getGaborKernel (Size ksize, double sigma, double theta, double lambd, double gamma, double psi=CV_PI *0.5, int ktype=CV_64F) |
| Returns Gabor filter coefficients. | |
| Mat | cv::getGaussianKernel (int ksize, double sigma, int ktype=CV_64F) |
| Returns Gaussian filter coefficients. | |
| Mat | cv::getStructuringElement (int shape, Size ksize, Point anchor=Point(-1,-1)) |
| Returns a structuring element of the specified size and shape for morphological operations. | |
| void | cv::Laplacian (InputArray src, OutputArray dst, int ddepth, int ksize=1, double scale=1, double delta=0, int borderType=BORDER_DEFAULT) |
| Calculates the Laplacian of an image. | |
| void | cv::medianBlur (InputArray src, OutputArray dst, int ksize) |
| Blurs an image using the median filter. | |
| static Scalar | cv::morphologyDefaultBorderValue () |
| returns "magic" border value for erosion and dilation. It is automatically transformed to Scalar::all(-DBL_MAX) for dilation. | |
| void | cv::morphologyEx (InputArray src, OutputArray dst, int op, InputArray kernel, Point anchor=Point(-1,-1), int iterations=1, int borderType=BORDER_CONSTANT, const Scalar &borderValue=morphologyDefaultBorderValue()) |
| Performs advanced morphological transformations. | |
| void | cv::pyrDown (InputArray src, OutputArray dst, const Size &dstsize=Size(), int borderType=BORDER_DEFAULT) |
| Blurs an image and downsamples it. | |
| void | cv::pyrMeanShiftFiltering (InputArray src, OutputArray dst, double sp, double sr, int maxLevel=1, TermCriteria termcrit=TermCriteria(TermCriteria::MAX_ITER+TermCriteria::EPS, 5, 1)) |
| Performs initial step of meanshift segmentation of an image. | |
| void | cv::pyrUp (InputArray src, OutputArray dst, const Size &dstsize=Size(), int borderType=BORDER_DEFAULT) |
| Upsamples an image and then blurs it. | |
| void | cv::Scharr (InputArray src, OutputArray dst, int ddepth, int dx, int dy, double scale=1, double delta=0, int borderType=BORDER_DEFAULT) |
| Calculates the first x- or y- image derivative using Scharr operator. | |
| void | cv::sepFilter2D (InputArray src, OutputArray dst, int ddepth, InputArray kernelX, InputArray kernelY, Point anchor=Point(-1,-1), double delta=0, int borderType=BORDER_DEFAULT) |
| Applies a separable linear filter to an image. | |
| void | cv::Sobel (InputArray src, OutputArray dst, int ddepth, int dx, int dy, int ksize=3, double scale=1, double delta=0, int borderType=BORDER_DEFAULT) |
| Calculates the first, second, third, or mixed image derivatives using an extended Sobel operator. | |
| void | cv::spatialGradient (InputArray src, OutputArray dx, OutputArray dy, int ksize=3, int borderType=BORDER_DEFAULT) |
| Calculates the first order image derivative in both x and y using a Sobel operator. | |
| void | cv::sqrBoxFilter (InputArray src, OutputArray dst, int ddepth, Size ksize, Point anchor=Point(-1, -1), bool normalize=true, int borderType=BORDER_DEFAULT) |
| Calculates the normalized sum of squares of the pixel values overlapping the filter. | |
| void | cv::stackBlur (InputArray src, OutputArray dst, Size ksize) |
| Blurs an image using the stackBlur. | |
Detailed Description
Functions and classes described in this section are used to perform various linear or non-linear filtering operations on 2D images (represented as Mat's). It means that for each pixel location \((x,y)\) in the source image (normally, rectangular), its neighborhood is considered and used to compute the response. In case of a linear filter, it is a weighted sum of pixel values. In case of morphological operations, it is the minimum or maximum values, and so on. The computed response is stored in the destination image at the same location \((x,y)\). It means that the output image will be of the same size as the input image. Normally, the functions support multi-channel arrays, in which case every channel is processed independently. Therefore, the output image will also have the same number of channels as the input one.
Another common feature of the functions and classes described in this section is that, unlike simple arithmetic functions, they need to extrapolate values of some non-existing pixels. For example, if you want to smooth an image using a Gaussian \(3 \times 3\) filter, then, when processing the left-most pixels in each row, you need pixels to the left of them, that is, outside of the image. You can let these pixels be the same as the left-most image pixels ("replicated border" extrapolation method), or assume that all the non-existing pixels are zeros ("constant border" extrapolation method), and so on. OpenCV enables you to specify the extrapolation method. For details, see BorderTypes
Depth combinations
| Input depth (src.depth()) | Output depth (ddepth) |
|---|---|
| CV_8U | -1/CV_16S/CV_32F/CV_64F |
| CV_16U/CV_16S | -1/CV_32F/CV_64F |
| CV_32F | -1/CV_32F |
| CV_64F | -1/CV_64F |
- Note
- when ddepth=-1, the output image will have the same depth as the source.
-
if you need double floating-point accuracy and using single floating-point input data (CV_32F input and CV_64F output depth combination), you can use Mat::convertTo to convert the input data to the desired precision.
@defgroup imgproc_transform Geometric Image Transformations
The functions in this section perform various geometrical transformations of 2D images. They do not change the image content but deform the pixel grid and map this deformed grid to the destination image. In fact, to avoid sampling artifacts, the mapping is done in the reverse order, from destination to the source. That is, for each pixel \((x, y)\) of the destination image, the functions compute coordinates of the corresponding "donor" pixel in the source image and copy the pixel value:
\[\texttt{dst} (x,y)= \texttt{src} (f_x(x,y), f_y(x,y))\]
In case when you specify the forward mapping \(\left<g_x, g_y\right>: \texttt{src} \rightarrow \texttt{dst}\), the OpenCV functions first compute the corresponding inverse mapping \(\left<f_x, f_y\right>: \texttt{dst} \rightarrow \texttt{src}\) and then use the above formula.
The actual implementations of the geometrical transformations, from the most generic remap and to the simplest and the fastest resize, need to solve two main problems with the above formula:
- Extrapolation of non-existing pixels. Similarly to the filtering functions described in the previous section, for some \((x,y)\), either one of \(f_x(x,y)\), or \(f_y(x,y)\), or both of them may fall outside of the image. In this case, an extrapolation method needs to be used. OpenCV provides the same selection of extrapolation methods as in the filtering functions. In addition, it provides the method BORDER_TRANSPARENT. This means that the corresponding pixels in the destination image will not be modified at all.
- Interpolation of pixel values. Usually \(f_x(x,y)\) and \(f_y(x,y)\) are floating-point numbers. This means that \(\left<f_x, f_y\right>\) can be either an affine or perspective transformation, or radial lens distortion correction, and so on. So, a pixel value at fractional coordinates needs to be retrieved. In the simplest case, the coordinates can be just rounded to the nearest integer coordinates and the corresponding pixel can be used. This is called a nearest-neighbor interpolation. However, a better result can be achieved by using more sophisticated interpolation methods , where a polynomial function is fit into some neighborhood of the computed pixel \((f_x(x,y), f_y(x,y))\), and then the value of the polynomial at \((f_x(x,y), f_y(x,y))\) is taken as the interpolated pixel value. In OpenCV, you can choose between several interpolation methods. See resize for details.
- Note
- The geometrical transformations do not work with
CV_8SorCV_32Simages.@defgroup imgproc_misc Miscellaneous Image Transformations @defgroup imgproc_draw Drawing Functions
Drawing functions work with matrices/images of arbitrary depth. The boundaries of the shapes can be rendered with antialiasing (implemented only for 8-bit images for now). All the functions include the parameter color that uses an RGB value (that may be constructed with the Scalar constructor ) for color images and brightness for grayscale images. For color images, the channel ordering is normally Blue, Green, Red. This is what imshow, imread, and imwrite expect. So, if you form a color using the Scalar constructor, it should look like:
\[\texttt{Scalar} (blue \_ component, green \_ component, red \_ component[, alpha \_ component])\]
If you are using your own image rendering and I/O functions, you can use any channel ordering. The drawing functions process each channel independently and do not depend on the channel order or even on the used color space. The whole image can be converted from BGR to RGB or to a different color space using cvtColor .
If a drawn figure is partially or completely outside the image, the drawing functions clip it. Also, many drawing functions can handle pixel coordinates specified with sub-pixel accuracy. This means that the coordinates can be passed as fixed-point numbers encoded as integers. The number of fractional bits is specified by the shift parameter and the real point coordinates are calculated as \(\texttt{Point}(x,y)\rightarrow\texttt{Point2f}(x*2^{-shift},y*2^{-shift})\) . This feature is especially effective when rendering antialiased shapes.
- Note
- The functions do not support alpha-transparency when the target image is 4-channel. In this case, the color[3] is simply copied to the repainted pixels. Thus, if you want to paint semi-transparent shapes, you can paint them in a separate buffer and then blend it with the main image.
@defgroup imgproc_color_conversions Color Space Conversions @defgroup imgproc_colormap ColorMaps in OpenCV
The human perception isn't built for observing fine changes in grayscale images. Human eyes are more sensitive to observing changes between colors, so you often need to recolor your grayscale images to get a clue about them. OpenCV now comes with various colormaps to enhance the visualization in your computer vision application.
In OpenCV you only need applyColorMap to apply a colormap on a given image. The following sample code reads the path to an image from command line, applies a Jet colormap on it and shows the result:
- See also
- ColormapTypes
@defgroup imgproc_subdiv2d Planar Subdivision
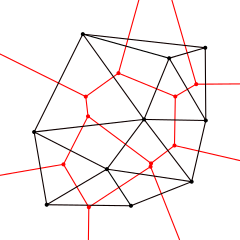
The Subdiv2D class described in this section is used to perform various planar subdivision on a set of 2D points (represented as vector of Point2f). OpenCV subdivides a plane into triangles using the Delaunay's algorithm, which corresponds to the dual graph of the Voronoi diagram. In the figure below, the Delaunay's Triangulation is marked with black lines and the Voronoi diagram with red lines.
The subdivisions can be used for the 3D piece-wise transformation of a plane, morphing, fast location of points on the plane, building special graphs (such as NNG,RNG), and so forth.
@defgroup imgproc_hist Histograms
@defgroup imgproc_shape Structural Analysis and Shape Descriptors
@defgroup imgproc_motion Motion Analysis and Object Tracking
@defgroup imgproc_feature Feature Detection
@defgroup imgproc_object Object Detection
@defgroup imgproc_segmentation Image Segmentation
@defgroup imgproc_c C API
@defgroup imgproc_hal Hardware Acceleration Layer
@{
@defgroup imgproc_hal_functions Functions
@defgroup imgproc_hal_interface Interface
@}
Enumeration Type Documentation
◆ MorphShapes
| enum cv::MorphShapes |
#include <opencv2/imgproc.hpp>
shape of the structuring element
◆ MorphTypes
| enum cv::MorphTypes |
#include <opencv2/imgproc.hpp>
type of morphological operation
| Enumerator | |
|---|---|
| MORPH_ERODE | see erode |
| MORPH_DILATE | see dilate |
| MORPH_OPEN | an opening operation \[\texttt{dst} = \mathrm{open} ( \texttt{src} , \texttt{element} )= \mathrm{dilate} ( \mathrm{erode} ( \texttt{src} , \texttt{element} ))\] |
| MORPH_CLOSE | a closing operation \[\texttt{dst} = \mathrm{close} ( \texttt{src} , \texttt{element} )= \mathrm{erode} ( \mathrm{dilate} ( \texttt{src} , \texttt{element} ))\] |
| MORPH_GRADIENT | a morphological gradient \[\texttt{dst} = \mathrm{morph\_grad} ( \texttt{src} , \texttt{element} )= \mathrm{dilate} ( \texttt{src} , \texttt{element} )- \mathrm{erode} ( \texttt{src} , \texttt{element} )\] |
| MORPH_TOPHAT | "top hat" \[\texttt{dst} = \mathrm{tophat} ( \texttt{src} , \texttt{element} )= \texttt{src} - \mathrm{open} ( \texttt{src} , \texttt{element} )\] |
| MORPH_BLACKHAT | "black hat" \[\texttt{dst} = \mathrm{blackhat} ( \texttt{src} , \texttt{element} )= \mathrm{close} ( \texttt{src} , \texttt{element} )- \texttt{src}\] |
| MORPH_HITMISS | "hit or miss" .- Only supported for CV_8UC1 binary images. A tutorial can be found in the documentation |
◆ SpecialFilter
| enum cv::SpecialFilter |
#include <opencv2/imgproc.hpp>
| Enumerator | |
|---|---|
| FILTER_SCHARR | |
Function Documentation
◆ bilateralFilter()
| void cv::bilateralFilter | ( | InputArray | src, |
| OutputArray | dst, | ||
| int | d, | ||
| double | sigmaColor, | ||
| double | sigmaSpace, | ||
| int | borderType = BORDER_DEFAULT |
||
| ) |
#include <opencv2/imgproc.hpp>
Applies the bilateral filter to an image.
The function applies bilateral filtering to the input image, as described in http://www.dai.ed.ac.uk/CVonline/LOCAL_COPIES/MANDUCHI1/Bilateral_Filtering.html bilateralFilter can reduce unwanted noise very well while keeping edges fairly sharp. However, it is very slow compared to most filters.
Sigma values: For simplicity, you can set the 2 sigma values to be the same. If they are small (< 10), the filter will not have much effect, whereas if they are large (> 150), they will have a very strong effect, making the image look "cartoonish".
Filter size: Large filters (d > 5) are very slow, so it is recommended to use d=5 for real-time applications, and perhaps d=9 for offline applications that need heavy noise filtering.
This filter does not work inplace.
- Parameters
-
src Source 8-bit or floating-point, 1-channel or 3-channel image. dst Destination image of the same size and type as src . d Diameter of each pixel neighborhood that is used during filtering. If it is non-positive, it is computed from sigmaSpace. sigmaColor Filter sigma in the color space. A larger value of the parameter means that farther colors within the pixel neighborhood (see sigmaSpace) will be mixed together, resulting in larger areas of semi-equal color. sigmaSpace Filter sigma in the coordinate space. A larger value of the parameter means that farther pixels will influence each other as long as their colors are close enough (see sigmaColor ). When d>0, it specifies the neighborhood size regardless of sigmaSpace. Otherwise, d is proportional to sigmaSpace. borderType border mode used to extrapolate pixels outside of the image, see BorderTypes
◆ blur()
| void cv::blur | ( | InputArray | src, |
| OutputArray | dst, | ||
| Size | ksize, | ||
| Point | anchor = Point(-1,-1), |
||
| int | borderType = BORDER_DEFAULT |
||
| ) |
#include <opencv2/imgproc.hpp>
Blurs an image using the normalized box filter.
The function smooths an image using the kernel:
\[\texttt{K} = \frac{1}{\texttt{ksize.width*ksize.height}} \begin{bmatrix} 1 & 1 & 1 & \cdots & 1 & 1 \\ 1 & 1 & 1 & \cdots & 1 & 1 \\ \hdotsfor{6} \\ 1 & 1 & 1 & \cdots & 1 & 1 \\ \end{bmatrix}\]
The call blur(src, dst, ksize, anchor, borderType) is equivalent to boxFilter(src, dst, src.type(), ksize, anchor, true, borderType).
- Parameters
-
src input image; it can have any number of channels, which are processed independently, but the depth should be CV_8U, CV_16U, CV_16S, CV_32F or CV_64F. dst output image of the same size and type as src. ksize blurring kernel size. anchor anchor point; default value Point(-1,-1) means that the anchor is at the kernel center. borderType border mode used to extrapolate pixels outside of the image, see BorderTypes. BORDER_WRAP is not supported.
- See also
- boxFilter, bilateralFilter, GaussianBlur, medianBlur
◆ boxFilter()
| void cv::boxFilter | ( | InputArray | src, |
| OutputArray | dst, | ||
| int | ddepth, | ||
| Size | ksize, | ||
| Point | anchor = Point(-1,-1), |
||
| bool | normalize = true, |
||
| int | borderType = BORDER_DEFAULT |
||
| ) |
#include <opencv2/imgproc.hpp>
Blurs an image using the box filter.
The function smooths an image using the kernel:
\[\texttt{K} = \alpha \begin{bmatrix} 1 & 1 & 1 & \cdots & 1 & 1 \\ 1 & 1 & 1 & \cdots & 1 & 1 \\ \hdotsfor{6} \\ 1 & 1 & 1 & \cdots & 1 & 1 \end{bmatrix}\]
where
\[\alpha = \begin{cases} \frac{1}{\texttt{ksize.width*ksize.height}} & \texttt{when } \texttt{normalize=true} \\1 & \texttt{otherwise}\end{cases}\]
Unnormalized box filter is useful for computing various integral characteristics over each pixel neighborhood, such as covariance matrices of image derivatives (used in dense optical flow algorithms, and so on). If you need to compute pixel sums over variable-size windows, use integral.
- Parameters
-
src input image. dst output image of the same size and type as src. ddepth the output image depth (-1 to use src.depth()). ksize blurring kernel size. anchor anchor point; default value Point(-1,-1) means that the anchor is at the kernel center. normalize flag, specifying whether the kernel is normalized by its area or not. borderType border mode used to extrapolate pixels outside of the image, see BorderTypes. BORDER_WRAP is not supported.
- See also
- blur, bilateralFilter, GaussianBlur, medianBlur, integral
◆ buildPyramid()
| void cv::buildPyramid | ( | InputArray | src, |
| OutputArrayOfArrays | dst, | ||
| int | maxlevel, | ||
| int | borderType = BORDER_DEFAULT |
||
| ) |
#include <opencv2/imgproc.hpp>
Constructs the Gaussian pyramid for an image.
The function constructs a vector of images and builds the Gaussian pyramid by recursively applying pyrDown to the previously built pyramid layers, starting from dst[0]==src.
- Parameters
-
src Source image. Check pyrDown for the list of supported types. dst Destination vector of maxlevel+1 images of the same type as src. dst[0] will be the same as src. dst[1] is the next pyramid layer, a smoothed and down-sized src, and so on. maxlevel 0-based index of the last (the smallest) pyramid layer. It must be non-negative. borderType Pixel extrapolation method, see BorderTypes (BORDER_CONSTANT isn't supported)
◆ dilate()
| void cv::dilate | ( | InputArray | src, |
| OutputArray | dst, | ||
| InputArray | kernel, | ||
| Point | anchor = Point(-1,-1), |
||
| int | iterations = 1, |
||
| int | borderType = BORDER_CONSTANT, |
||
| const Scalar & | borderValue = morphologyDefaultBorderValue() |
||
| ) |
#include <opencv2/imgproc.hpp>
Dilates an image by using a specific structuring element.
The function dilates the source image using the specified structuring element that determines the shape of a pixel neighborhood over which the maximum is taken:
\[\texttt{dst} (x,y) = \max _{(x',y'): \, \texttt{element} (x',y') \ne0 } \texttt{src} (x+x',y+y')\]
The function supports the in-place mode. Dilation can be applied several ( iterations ) times. In case of multi-channel images, each channel is processed independently.
- Parameters
-
src input image; the number of channels can be arbitrary, but the depth should be one of CV_8U, CV_16U, CV_16S, CV_32F or CV_64F. dst output image of the same size and type as src. kernel structuring element used for dilation; if element=Mat(), a 3 x 3 rectangular structuring element is used. Kernel can be created using getStructuringElement anchor position of the anchor within the element; default value (-1, -1) means that the anchor is at the element center. iterations number of times dilation is applied. borderType pixel extrapolation method, see BorderTypes. BORDER_WRAP is not suported. borderValue border value in case of a constant border
- See also
- erode, morphologyEx, getStructuringElement
◆ erode()
| void cv::erode | ( | InputArray | src, |
| OutputArray | dst, | ||
| InputArray | kernel, | ||
| Point | anchor = Point(-1,-1), |
||
| int | iterations = 1, |
||
| int | borderType = BORDER_CONSTANT, |
||
| const Scalar & | borderValue = morphologyDefaultBorderValue() |
||
| ) |
#include <opencv2/imgproc.hpp>
Erodes an image by using a specific structuring element.
The function erodes the source image using the specified structuring element that determines the shape of a pixel neighborhood over which the minimum is taken:
\[\texttt{dst} (x,y) = \min _{(x',y'): \, \texttt{element} (x',y') \ne0 } \texttt{src} (x+x',y+y')\]
The function supports the in-place mode. Erosion can be applied several ( iterations ) times. In case of multi-channel images, each channel is processed independently.
- Parameters
-
src input image; the number of channels can be arbitrary, but the depth should be one of CV_8U, CV_16U, CV_16S, CV_32F or CV_64F. dst output image of the same size and type as src. kernel structuring element used for erosion; if element=Mat(), a3 x 3rectangular structuring element is used. Kernel can be created using getStructuringElement.anchor position of the anchor within the element; default value (-1, -1) means that the anchor is at the element center. iterations number of times erosion is applied. borderType pixel extrapolation method, see BorderTypes. BORDER_WRAP is not supported. borderValue border value in case of a constant border
- See also
- dilate, morphologyEx, getStructuringElement
◆ filter2D()
| void cv::filter2D | ( | InputArray | src, |
| OutputArray | dst, | ||
| int | ddepth, | ||
| InputArray | kernel, | ||
| Point | anchor = Point(-1,-1), |
||
| double | delta = 0, |
||
| int | borderType = BORDER_DEFAULT |
||
| ) |
#include <opencv2/imgproc.hpp>
Convolves an image with the kernel.
The function applies an arbitrary linear filter to an image. In-place operation is supported. When the aperture is partially outside the image, the function interpolates outlier pixel values according to the specified border mode.
The function does actually compute correlation, not the convolution:
\[\texttt{dst} (x,y) = \sum _{ \substack{0\leq x' < \texttt{kernel.cols}\\{0\leq y' < \texttt{kernel.rows}}}} \texttt{kernel} (x',y')* \texttt{src} (x+x'- \texttt{anchor.x} ,y+y'- \texttt{anchor.y} )\]
That is, the kernel is not mirrored around the anchor point. If you need a real convolution, flip the kernel using flip and set the new anchor to (kernel.cols - anchor.x - 1, kernel.rows - anchor.y - 1).
The function uses the DFT-based algorithm in case of sufficiently large kernels (~11 x 11 or larger) and the direct algorithm for small kernels.
- Parameters
-
src input image. dst output image of the same size and the same number of channels as src. ddepth desired depth of the destination image, see combinations kernel convolution kernel (or rather a correlation kernel), a single-channel floating point matrix; if you want to apply different kernels to different channels, split the image into separate color planes using split and process them individually. anchor anchor of the kernel that indicates the relative position of a filtered point within the kernel; the anchor should lie within the kernel; default value (-1,-1) means that the anchor is at the kernel center. delta optional value added to the filtered pixels before storing them in dst. borderType pixel extrapolation method, see BorderTypes. BORDER_WRAP is not supported.
- See also
- sepFilter2D, dft, matchTemplate
◆ GaussianBlur()
| void cv::GaussianBlur | ( | InputArray | src, |
| OutputArray | dst, | ||
| Size | ksize, | ||
| double | sigmaX, | ||
| double | sigmaY = 0, |
||
| int | borderType = BORDER_DEFAULT |
||
| ) |
#include <opencv2/imgproc.hpp>
Blurs an image using a Gaussian filter.
The function convolves the source image with the specified Gaussian kernel. In-place filtering is supported.
- Parameters
-
src input image; the image can have any number of channels, which are processed independently, but the depth should be CV_8U, CV_16U, CV_16S, CV_32F or CV_64F. dst output image of the same size and type as src. ksize Gaussian kernel size. ksize.width and ksize.height can differ but they both must be positive and odd. Or, they can be zero's and then they are computed from sigma. sigmaX Gaussian kernel standard deviation in X direction. sigmaY Gaussian kernel standard deviation in Y direction; if sigmaY is zero, it is set to be equal to sigmaX, if both sigmas are zeros, they are computed from ksize.width and ksize.height, respectively (see getGaussianKernel for details); to fully control the result regardless of possible future modifications of all this semantics, it is recommended to specify all of ksize, sigmaX, and sigmaY. borderType pixel extrapolation method, see BorderTypes. BORDER_WRAP is not supported.
- See also
- sepFilter2D, filter2D, blur, boxFilter, bilateralFilter, medianBlur
◆ getDerivKernels()
| void cv::getDerivKernels | ( | OutputArray | kx, |
| OutputArray | ky, | ||
| int | dx, | ||
| int | dy, | ||
| int | ksize, | ||
| bool | normalize = false, |
||
| int | ktype = CV_32F |
||
| ) |
#include <opencv2/imgproc.hpp>
Returns filter coefficients for computing spatial image derivatives.
The function computes and returns the filter coefficients for spatial image derivatives. When ksize=FILTER_SCHARR, the Scharr \(3 \times 3\) kernels are generated (see Scharr). Otherwise, Sobel kernels are generated (see Sobel). The filters are normally passed to sepFilter2D or to
- Parameters
-
kx Output matrix of row filter coefficients. It has the type ktype . ky Output matrix of column filter coefficients. It has the type ktype . dx Derivative order in respect of x. dy Derivative order in respect of y. ksize Aperture size. It can be FILTER_SCHARR, 1, 3, 5, or 7. normalize Flag indicating whether to normalize (scale down) the filter coefficients or not. Theoretically, the coefficients should have the denominator \(=2^{ksize*2-dx-dy-2}\). If you are going to filter floating-point images, you are likely to use the normalized kernels. But if you compute derivatives of an 8-bit image, store the results in a 16-bit image, and wish to preserve all the fractional bits, you may want to set normalize=false . ktype Type of filter coefficients. It can be CV_32f or CV_64F .
◆ getGaborKernel()
| Mat cv::getGaborKernel | ( | Size | ksize, |
| double | sigma, | ||
| double | theta, | ||
| double | lambd, | ||
| double | gamma, | ||
| double | psi = CV_PI *0.5, |
||
| int | ktype = CV_64F |
||
| ) |
#include <opencv2/imgproc.hpp>
Returns Gabor filter coefficients.
For more details about gabor filter equations and parameters, see: Gabor Filter.
- Parameters
-
ksize Size of the filter returned. sigma Standard deviation of the gaussian envelope. theta Orientation of the normal to the parallel stripes of a Gabor function. lambd Wavelength of the sinusoidal factor. gamma Spatial aspect ratio. psi Phase offset. ktype Type of filter coefficients. It can be CV_32F or CV_64F .
◆ getGaussianKernel()
#include <opencv2/imgproc.hpp>
Returns Gaussian filter coefficients.
The function computes and returns the \(\texttt{ksize} \times 1\) matrix of Gaussian filter coefficients:
\[G_i= \alpha *e^{-(i-( \texttt{ksize} -1)/2)^2/(2* \texttt{sigma}^2)},\]
where \(i=0..\texttt{ksize}-1\) and \(\alpha\) is the scale factor chosen so that \(\sum_i G_i=1\).
Two of such generated kernels can be passed to sepFilter2D. Those functions automatically recognize smoothing kernels (a symmetrical kernel with sum of weights equal to 1) and handle them accordingly. You may also use the higher-level GaussianBlur.
- Parameters
-
ksize Aperture size. It should be odd ( \(\texttt{ksize} \mod 2 = 1\) ) and positive. sigma Gaussian standard deviation. If it is non-positive, it is computed from ksize as sigma = 0.3*((ksize-1)*0.5 - 1) + 0.8.ktype Type of filter coefficients. It can be CV_32F or CV_64F .
◆ getStructuringElement()
#include <opencv2/imgproc.hpp>
Returns a structuring element of the specified size and shape for morphological operations.
The function constructs and returns the structuring element that can be further passed to erode, dilate or morphologyEx. But you can also construct an arbitrary binary mask yourself and use it as the structuring element.
- Parameters
-
shape Element shape that could be one of MorphShapes ksize Size of the structuring element. anchor Anchor position within the element. The default value \((-1, -1)\) means that the anchor is at the center. Note that only the shape of a cross-shaped element depends on the anchor position. In other cases the anchor just regulates how much the result of the morphological operation is shifted.
◆ Laplacian()
| void cv::Laplacian | ( | InputArray | src, |
| OutputArray | dst, | ||
| int | ddepth, | ||
| int | ksize = 1, |
||
| double | scale = 1, |
||
| double | delta = 0, |
||
| int | borderType = BORDER_DEFAULT |
||
| ) |
#include <opencv2/imgproc.hpp>
Calculates the Laplacian of an image.
The function calculates the Laplacian of the source image by adding up the second x and y derivatives calculated using the Sobel operator:
\[\texttt{dst} = \Delta \texttt{src} = \frac{\partial^2 \texttt{src}}{\partial x^2} + \frac{\partial^2 \texttt{src}}{\partial y^2}\]
This is done when ksize > 1. When ksize == 1, the Laplacian is computed by filtering the image with the following \(3 \times 3\) aperture:
\[\vecthreethree {0}{1}{0}{1}{-4}{1}{0}{1}{0}\]
- Parameters
-
src Source image. dst Destination image of the same size and the same number of channels as src . ddepth Desired depth of the destination image, see combinations. ksize Aperture size used to compute the second-derivative filters. See getDerivKernels for details. The size must be positive and odd. scale Optional scale factor for the computed Laplacian values. By default, no scaling is applied. See getDerivKernels for details. delta Optional delta value that is added to the results prior to storing them in dst . borderType Pixel extrapolation method, see BorderTypes. BORDER_WRAP is not supported.
◆ medianBlur()
| void cv::medianBlur | ( | InputArray | src, |
| OutputArray | dst, | ||
| int | ksize | ||
| ) |
#include <opencv2/imgproc.hpp>
Blurs an image using the median filter.
The function smoothes an image using the median filter with the \(\texttt{ksize} \times \texttt{ksize}\) aperture. Each channel of a multi-channel image is processed independently. In-place operation is supported.
- Note
- The median filter uses BORDER_REPLICATE internally to cope with border pixels, see BorderTypes
- Parameters
-
src input 1-, 3-, or 4-channel image; when ksize is 3 or 5, the image depth should be CV_8U, CV_16U, or CV_32F, for larger aperture sizes, it can only be CV_8U. dst destination array of the same size and type as src. ksize aperture linear size; it must be odd and greater than 1, for example: 3, 5, 7 ...
- See also
- bilateralFilter, blur, boxFilter, GaussianBlur
◆ morphologyDefaultBorderValue()
|
inlinestatic |
#include <opencv2/imgproc.hpp>
returns "magic" border value for erosion and dilation. It is automatically transformed to Scalar::all(-DBL_MAX) for dilation.
◆ morphologyEx()
| void cv::morphologyEx | ( | InputArray | src, |
| OutputArray | dst, | ||
| int | op, | ||
| InputArray | kernel, | ||
| Point | anchor = Point(-1,-1), |
||
| int | iterations = 1, |
||
| int | borderType = BORDER_CONSTANT, |
||
| const Scalar & | borderValue = morphologyDefaultBorderValue() |
||
| ) |
#include <opencv2/imgproc.hpp>
Performs advanced morphological transformations.
The function cv::morphologyEx can perform advanced morphological transformations using an erosion and dilation as basic operations.
Any of the operations can be done in-place. In case of multi-channel images, each channel is processed independently.
- Parameters
-
src Source image. The number of channels can be arbitrary. The depth should be one of CV_8U, CV_16U, CV_16S, CV_32F or CV_64F. dst Destination image of the same size and type as source image. op Type of a morphological operation, see MorphTypes kernel Structuring element. It can be created using getStructuringElement. anchor Anchor position with the kernel. Negative values mean that the anchor is at the kernel center. iterations Number of times erosion and dilation are applied. borderType Pixel extrapolation method, see BorderTypes. BORDER_WRAP is not supported. borderValue Border value in case of a constant border. The default value has a special meaning.
- See also
- dilate, erode, getStructuringElement
- Note
- The number of iterations is the number of times erosion or dilatation operation will be applied. For instance, an opening operation (MORPH_OPEN) with two iterations is equivalent to apply successively: erode -> erode -> dilate -> dilate (and not erode -> dilate -> erode -> dilate).
◆ pyrDown()
| void cv::pyrDown | ( | InputArray | src, |
| OutputArray | dst, | ||
| const Size & | dstsize = Size(), |
||
| int | borderType = BORDER_DEFAULT |
||
| ) |
#include <opencv2/imgproc.hpp>
Blurs an image and downsamples it.
By default, size of the output image is computed as Size((src.cols+1)/2, (src.rows+1)/2), but in any case, the following conditions should be satisfied:
\[\begin{array}{l} | \texttt{dstsize.width} *2-src.cols| \leq 2 \\ | \texttt{dstsize.height} *2-src.rows| \leq 2 \end{array}\]
The function performs the downsampling step of the Gaussian pyramid construction. First, it convolves the source image with the kernel:
\[\frac{1}{256} \begin{bmatrix} 1 & 4 & 6 & 4 & 1 \\ 4 & 16 & 24 & 16 & 4 \\ 6 & 24 & 36 & 24 & 6 \\ 4 & 16 & 24 & 16 & 4 \\ 1 & 4 & 6 & 4 & 1 \end{bmatrix}\]
Then, it downsamples the image by rejecting even rows and columns.
- Parameters
-
src input image. dst output image; it has the specified size and the same type as src. dstsize size of the output image. borderType Pixel extrapolation method, see BorderTypes (BORDER_CONSTANT isn't supported)
◆ pyrMeanShiftFiltering()
| void cv::pyrMeanShiftFiltering | ( | InputArray | src, |
| OutputArray | dst, | ||
| double | sp, | ||
| double | sr, | ||
| int | maxLevel = 1, |
||
| TermCriteria | termcrit = TermCriteria(TermCriteria::MAX_ITER+TermCriteria::EPS, 5, 1) |
||
| ) |
#include <opencv2/imgproc.hpp>
Performs initial step of meanshift segmentation of an image.
The function implements the filtering stage of meanshift segmentation, that is, the output of the function is the filtered "posterized" image with color gradients and fine-grain texture flattened. At every pixel (X,Y) of the input image (or down-sized input image, see below) the function executes meanshift iterations, that is, the pixel (X,Y) neighborhood in the joint space-color hyperspace is considered:
\[(x,y): X- \texttt{sp} \le x \le X+ \texttt{sp} , Y- \texttt{sp} \le y \le Y+ \texttt{sp} , ||(R,G,B)-(r,g,b)|| \le \texttt{sr}\]
where (R,G,B) and (r,g,b) are the vectors of color components at (X,Y) and (x,y), respectively (though, the algorithm does not depend on the color space used, so any 3-component color space can be used instead). Over the neighborhood the average spatial value (X',Y') and average color vector (R',G',B') are found and they act as the neighborhood center on the next iteration:
\[(X,Y)~(X',Y'), (R,G,B)~(R',G',B').\]
After the iterations over, the color components of the initial pixel (that is, the pixel from where the iterations started) are set to the final value (average color at the last iteration):
\[I(X,Y) <- (R*,G*,B*)\]
When maxLevel > 0, the gaussian pyramid of maxLevel+1 levels is built, and the above procedure is run on the smallest layer first. After that, the results are propagated to the larger layer and the iterations are run again only on those pixels where the layer colors differ by more than sr from the lower-resolution layer of the pyramid. That makes boundaries of color regions sharper. Note that the results will be actually different from the ones obtained by running the meanshift procedure on the whole original image (i.e. when maxLevel==0).
- Parameters
-
src The source 8-bit, 3-channel image. dst The destination image of the same format and the same size as the source. sp The spatial window radius. sr The color window radius. maxLevel Maximum level of the pyramid for the segmentation. termcrit Termination criteria: when to stop meanshift iterations.
◆ pyrUp()
| void cv::pyrUp | ( | InputArray | src, |
| OutputArray | dst, | ||
| const Size & | dstsize = Size(), |
||
| int | borderType = BORDER_DEFAULT |
||
| ) |
#include <opencv2/imgproc.hpp>
Upsamples an image and then blurs it.
By default, size of the output image is computed as Size(src.cols\*2, (src.rows\*2), but in any case, the following conditions should be satisfied:
\[\begin{array}{l} | \texttt{dstsize.width} -src.cols*2| \leq ( \texttt{dstsize.width} \mod 2) \\ | \texttt{dstsize.height} -src.rows*2| \leq ( \texttt{dstsize.height} \mod 2) \end{array}\]
The function performs the upsampling step of the Gaussian pyramid construction, though it can actually be used to construct the Laplacian pyramid. First, it upsamples the source image by injecting even zero rows and columns and then convolves the result with the same kernel as in pyrDown multiplied by 4.
- Parameters
-
src input image. dst output image. It has the specified size and the same type as src . dstsize size of the output image. borderType Pixel extrapolation method, see BorderTypes (only BORDER_DEFAULT is supported)
◆ Scharr()
| void cv::Scharr | ( | InputArray | src, |
| OutputArray | dst, | ||
| int | ddepth, | ||
| int | dx, | ||
| int | dy, | ||
| double | scale = 1, |
||
| double | delta = 0, |
||
| int | borderType = BORDER_DEFAULT |
||
| ) |
#include <opencv2/imgproc.hpp>
Calculates the first x- or y- image derivative using Scharr operator.
The function computes the first x- or y- spatial image derivative using the Scharr operator. The call
\[\texttt{Scharr(src, dst, ddepth, dx, dy, scale, delta, borderType)}\]
is equivalent to
\[\texttt{Sobel(src, dst, ddepth, dx, dy, FILTER_SCHARR, scale, delta, borderType)} .\]
- Parameters
-
src input image. dst output image of the same size and the same number of channels as src. ddepth output image depth, see combinations dx order of the derivative x. dy order of the derivative y. scale optional scale factor for the computed derivative values; by default, no scaling is applied (see getDerivKernels for details). delta optional delta value that is added to the results prior to storing them in dst. borderType pixel extrapolation method, see BorderTypes. BORDER_WRAP is not supported.
- See also
- cartToPolar
◆ sepFilter2D()
| void cv::sepFilter2D | ( | InputArray | src, |
| OutputArray | dst, | ||
| int | ddepth, | ||
| InputArray | kernelX, | ||
| InputArray | kernelY, | ||
| Point | anchor = Point(-1,-1), |
||
| double | delta = 0, |
||
| int | borderType = BORDER_DEFAULT |
||
| ) |
#include <opencv2/imgproc.hpp>
Applies a separable linear filter to an image.
The function applies a separable linear filter to the image. That is, first, every row of src is filtered with the 1D kernel kernelX. Then, every column of the result is filtered with the 1D kernel kernelY. The final result shifted by delta is stored in dst .
- Parameters
-
src Source image. dst Destination image of the same size and the same number of channels as src . ddepth Destination image depth, see combinations kernelX Coefficients for filtering each row. kernelY Coefficients for filtering each column. anchor Anchor position within the kernel. The default value \((-1,-1)\) means that the anchor is at the kernel center. delta Value added to the filtered results before storing them. borderType Pixel extrapolation method, see BorderTypes. BORDER_WRAP is not supported.
- See also
- filter2D, Sobel, GaussianBlur, boxFilter, blur
◆ Sobel()
| void cv::Sobel | ( | InputArray | src, |
| OutputArray | dst, | ||
| int | ddepth, | ||
| int | dx, | ||
| int | dy, | ||
| int | ksize = 3, |
||
| double | scale = 1, |
||
| double | delta = 0, |
||
| int | borderType = BORDER_DEFAULT |
||
| ) |
#include <opencv2/imgproc.hpp>
Calculates the first, second, third, or mixed image derivatives using an extended Sobel operator.
In all cases except one, the \(\texttt{ksize} \times \texttt{ksize}\) separable kernel is used to calculate the derivative. When \(\texttt{ksize = 1}\), the \(3 \times 1\) or \(1 \times 3\) kernel is used (that is, no Gaussian smoothing is done). ksize = 1 can only be used for the first or the second x- or y- derivatives.
There is also the special value ksize = #FILTER_SCHARR (-1) that corresponds to the \(3\times3\) Scharr filter that may give more accurate results than the \(3\times3\) Sobel. The Scharr aperture is
\[\vecthreethree{-3}{0}{3}{-10}{0}{10}{-3}{0}{3}\]
for the x-derivative, or transposed for the y-derivative.
The function calculates an image derivative by convolving the image with the appropriate kernel:
\[\texttt{dst} = \frac{\partial^{xorder+yorder} \texttt{src}}{\partial x^{xorder} \partial y^{yorder}}\]
The Sobel operators combine Gaussian smoothing and differentiation, so the result is more or less resistant to the noise. Most often, the function is called with ( xorder = 1, yorder = 0, ksize = 3) or ( xorder = 0, yorder = 1, ksize = 3) to calculate the first x- or y- image derivative. The first case corresponds to a kernel of:
\[\vecthreethree{-1}{0}{1}{-2}{0}{2}{-1}{0}{1}\]
The second case corresponds to a kernel of:
\[\vecthreethree{-1}{-2}{-1}{0}{0}{0}{1}{2}{1}\]
- Parameters
-
src input image. dst output image of the same size and the same number of channels as src . ddepth output image depth, see combinations; in the case of 8-bit input images it will result in truncated derivatives. dx order of the derivative x. dy order of the derivative y. ksize size of the extended Sobel kernel; it must be 1, 3, 5, or 7. scale optional scale factor for the computed derivative values; by default, no scaling is applied (see getDerivKernels for details). delta optional delta value that is added to the results prior to storing them in dst. borderType pixel extrapolation method, see BorderTypes. BORDER_WRAP is not supported.
- See also
- Scharr, Laplacian, sepFilter2D, filter2D, GaussianBlur, cartToPolar
◆ spatialGradient()
| void cv::spatialGradient | ( | InputArray | src, |
| OutputArray | dx, | ||
| OutputArray | dy, | ||
| int | ksize = 3, |
||
| int | borderType = BORDER_DEFAULT |
||
| ) |
#include <opencv2/imgproc.hpp>
Calculates the first order image derivative in both x and y using a Sobel operator.
Equivalent to calling:
- Parameters
-
src input image. dx output image with first-order derivative in x. dy output image with first-order derivative in y. ksize size of Sobel kernel. It must be 3. borderType pixel extrapolation method, see BorderTypes. Only BORDER_DEFAULT=BORDER_REFLECT_101 and BORDER_REPLICATE are supported.
- See also
- Sobel
◆ sqrBoxFilter()
| void cv::sqrBoxFilter | ( | InputArray | src, |
| OutputArray | dst, | ||
| int | ddepth, | ||
| Size | ksize, | ||
| Point | anchor = Point(-1, -1), |
||
| bool | normalize = true, |
||
| int | borderType = BORDER_DEFAULT |
||
| ) |
#include <opencv2/imgproc.hpp>
Calculates the normalized sum of squares of the pixel values overlapping the filter.
For every pixel \( (x, y) \) in the source image, the function calculates the sum of squares of those neighboring pixel values which overlap the filter placed over the pixel \( (x, y) \).
The unnormalized square box filter can be useful in computing local image statistics such as the local variance and standard deviation around the neighborhood of a pixel.
- Parameters
-
src input image dst output image of the same size and type as src ddepth the output image depth (-1 to use src.depth()) ksize kernel size anchor kernel anchor point. The default value of Point(-1, -1) denotes that the anchor is at the kernel center. normalize flag, specifying whether the kernel is to be normalized by it's area or not. borderType border mode used to extrapolate pixels outside of the image, see BorderTypes. BORDER_WRAP is not supported.
- See also
- boxFilter
◆ stackBlur()
| void cv::stackBlur | ( | InputArray | src, |
| OutputArray | dst, | ||
| Size | ksize | ||
| ) |
#include <opencv2/imgproc.hpp>
Blurs an image using the stackBlur.
The function applies and stackBlur to an image. stackBlur can generate similar results as Gaussian blur, and the time consumption does not increase with the increase of kernel size. It creates a kind of moving stack of colors whilst scanning through the image. Thereby it just has to add one new block of color to the right side of the stack and remove the leftmost color. The remaining colors on the topmost layer of the stack are either added on or reduced by one, depending on if they are on the right or on the left side of the stack. The only supported borderType is BORDER_REPLICATE. Original paper was proposed by Mario Klingemann, which can be found http://underdestruction.com/2004/02/25/stackblur-2004.
- Parameters
-
src input image. The number of channels can be arbitrary, but the depth should be one of CV_8U, CV_16U, CV_16S or CV_32F. dst output image of the same size and type as src. ksize stack-blurring kernel size. The ksize.width and ksize.height can differ but they both must be positive and odd.
