Creating your own corner detector
Table of Contents
Prev Tutorial: Shi-Tomasi corner detector
Next Tutorial: Detecting corners location in subpixels
| Original author | Ana Huamán |
| Compatibility | OpenCV >= 3.0 |
Goal
In this tutorial you will learn how to:
- Use the OpenCV function cv::cornerEigenValsAndVecs to find the eigenvalues and eigenvectors to determine if a pixel is a corner.
- Use the OpenCV function cv::cornerMinEigenVal to find the minimum eigenvalues for corner detection.
- Implement our own version of the Harris detector as well as the Shi-Tomasi detector, by using the two functions above.
Theory
Code
C++
This tutorial code's is shown lines below. You can also download it from here
#include "opencv2/highgui.hpp"
#include "opencv2/imgproc.hpp"
#include <iostream>
using namespace cv;
using namespace std;
Mat src, src_gray;
Mat myHarris_dst, myHarris_copy, Mc;
Mat myShiTomasi_dst, myShiTomasi_copy;
int myShiTomasi_qualityLevel = 50;
int myHarris_qualityLevel = 50;
int max_qualityLevel = 100;
double myHarris_minVal, myHarris_maxVal;
double myShiTomasi_minVal, myShiTomasi_maxVal;
RNG rng(12345);
const char* myHarris_window = "My Harris corner detector";
const char* myShiTomasi_window = "My Shi Tomasi corner detector";
void myShiTomasi_function( int, void* );
void myHarris_function( int, void* );
int main( int argc, char** argv )
{
CommandLineParser parser( argc, argv, "{@input | building.jpg | input image}" );
src = imread( samples::findFile( parser.get<String>( "@input" ) ) );
if ( src.empty() )
{
cout << "Could not open or find the image!\n" << endl;
cout << "Usage: " << argv[0] << " <Input image>" << endl;
return -1;
}
cvtColor( src, src_gray, COLOR_BGR2GRAY );
int blockSize = 3, apertureSize = 3;
cornerEigenValsAndVecs( src_gray, myHarris_dst, blockSize, apertureSize );
/* calculate Mc */
{
{
Mc.at<float>(i, j) = lambda_1*lambda_2 - 0.04f*((lambda_1 + lambda_2) * (lambda_1 + lambda_2));
}
}
minMaxLoc( Mc, &myHarris_minVal, &myHarris_maxVal );
/* Create Window and Trackbar */
namedWindow( myHarris_window );
createTrackbar( "Quality Level:", myHarris_window, &myHarris_qualityLevel, max_qualityLevel, myHarris_function );
myHarris_function( 0, 0 );
cornerMinEigenVal( src_gray, myShiTomasi_dst, blockSize, apertureSize );
minMaxLoc( myShiTomasi_dst, &myShiTomasi_minVal, &myShiTomasi_maxVal );
/* Create Window and Trackbar */
namedWindow( myShiTomasi_window );
createTrackbar( "Quality Level:", myShiTomasi_window, &myShiTomasi_qualityLevel, max_qualityLevel, myShiTomasi_function );
myShiTomasi_function( 0, 0 );
waitKey();
return 0;
}
void myShiTomasi_function( int, void* )
{
myShiTomasi_copy = src.clone();
myShiTomasi_qualityLevel = MAX(myShiTomasi_qualityLevel, 1);
{
{
if( myShiTomasi_dst.at<float>(i,j) > myShiTomasi_minVal + ( myShiTomasi_maxVal - myShiTomasi_minVal )*myShiTomasi_qualityLevel/max_qualityLevel )
{
circle( myShiTomasi_copy, Point(j,i), 4, Scalar( rng.uniform(0,256), rng.uniform(0,256), rng.uniform(0,256) ), FILLED );
}
}
}
imshow( myShiTomasi_window, myShiTomasi_copy );
}
void myHarris_function( int, void* )
{
myHarris_copy = src.clone();
myHarris_qualityLevel = MAX(myHarris_qualityLevel, 1);
{
{
if( Mc.at<float>(i,j) > myHarris_minVal + ( myHarris_maxVal - myHarris_minVal )*myHarris_qualityLevel/max_qualityLevel )
{
circle( myHarris_copy, Point(j,i), 4, Scalar( rng.uniform(0,256), rng.uniform(0,256), rng.uniform(0,256) ), FILLED );
}
}
}
imshow( myHarris_window, myHarris_copy );
}
CV_NODISCARD_STD Mat clone() const
Creates a full copy of the array and the underlying data.
int rows
the number of rows and columns or (-1, -1) when the matrix has more than 2 dimensions
Definition: mat.hpp:2137
void imshow(const String &winname, InputArray mat)
Displays an image in the specified window.
"black box" representation of the file storage associated with a file on disk.
Definition: core.hpp:106
STL namespace.
Java
This tutorial code's is shown lines below. You can also download it from here
import java.awt.BorderLayout;
import java.awt.Container;
import java.awt.Image;
import java.util.Random;
import javax.swing.BoxLayout;
import javax.swing.ImageIcon;
import javax.swing.JFrame;
import javax.swing.JLabel;
import javax.swing.JPanel;
import javax.swing.JSlider;
import javax.swing.event.ChangeEvent;
import javax.swing.event.ChangeListener;
import org.opencv.core.Core;
import org.opencv.core.Core.MinMaxLocResult;
import org.opencv.core.CvType;
import org.opencv.core.Mat;
import org.opencv.core.Point;
import org.opencv.core.Scalar;
import org.opencv.highgui.HighGui;
import org.opencv.imgcodecs.Imgcodecs;
import org.opencv.imgproc.Imgproc;
class CornerDetector {
private Mat src = new Mat();
private Mat srcGray = new Mat();
private Mat harrisDst = new Mat();
private Mat shiTomasiDst = new Mat();
private Mat harrisCopy = new Mat();
private Mat shiTomasiCopy = new Mat();
private Mat Mc = new Mat();
private JFrame frame;
private JLabel harrisImgLabel;
private JLabel shiTomasiImgLabel;
private static final int MAX_QUALITY_LEVEL = 100;
private int qualityLevel = 50;
private double harrisMinVal;
private double harrisMaxVal;
private double shiTomasiMinVal;
private double shiTomasiMaxVal;
private Random rng = new Random(12345);
public CornerDetector(String[] args) {
String filename = args.length > 0 ? args[0] : "../data/building.jpg";
src = Imgcodecs.imread(filename);
if (src.empty()) {
System.err.println("Cannot read image: " + filename);
System.exit(0);
}
Imgproc.cvtColor(src, srcGray, Imgproc.COLOR_BGR2GRAY);
// Create and set up the window.
frame = new JFrame("Creating your own corner detector demo");
frame.setDefaultCloseOperation(JFrame.EXIT_ON_CLOSE);
// Set up the content pane.
Image img = HighGui.toBufferedImage(src);
addComponentsToPane(frame.getContentPane(), img);
// Use the content pane's default BorderLayout. No need for
// setLayout(new BorderLayout());
// Display the window.
frame.pack();
frame.setVisible(true);
int blockSize = 3, apertureSize = 3;
Imgproc.cornerEigenValsAndVecs(srcGray, harrisDst, blockSize, apertureSize);
/* calculate Mc */
Mc = Mat.zeros(srcGray.size(), CvType.CV_32F);
float[] harrisData = new float[(int) (harrisDst.total() * harrisDst.channels())];
harrisDst.get(0, 0, harrisData);
float[] McData = new float[(int) (Mc.total() * Mc.channels())];
Mc.get(0, 0, McData);
for( int i = 0; i < srcGray.rows(); i++ ) {
for( int j = 0; j < srcGray.cols(); j++ ) {
float lambda1 = harrisData[(i*srcGray.cols() + j) * 6];
float lambda2 = harrisData[(i*srcGray.cols() + j) * 6 + 1];
McData[i*srcGray.cols()+j] = (float) (lambda1*lambda2 - 0.04f*Math.pow( ( lambda1 + lambda2 ), 2 ));
}
}
Mc.put(0, 0, McData);
MinMaxLocResult res = Core.minMaxLoc(Mc);
harrisMinVal = res.minVal;
harrisMaxVal = res.maxVal;
Imgproc.cornerMinEigenVal(srcGray, shiTomasiDst, blockSize, apertureSize);
res = Core.minMaxLoc(shiTomasiDst);
shiTomasiMinVal = res.minVal;
shiTomasiMaxVal = res.maxVal;
update();
}
private void addComponentsToPane(Container pane, Image img) {
if (!(pane.getLayout() instanceof BorderLayout)) {
pane.add(new JLabel("Container doesn't use BorderLayout!"));
return;
}
JPanel sliderPanel = new JPanel();
sliderPanel.setLayout(new BoxLayout(sliderPanel, BoxLayout.PAGE_AXIS));
sliderPanel.add(new JLabel("Max corners:"));
JSlider slider = new JSlider(0, MAX_QUALITY_LEVEL, qualityLevel);
slider.setMajorTickSpacing(20);
slider.setMinorTickSpacing(10);
slider.setPaintTicks(true);
slider.setPaintLabels(true);
slider.addChangeListener(new ChangeListener() {
@Override
public void stateChanged(ChangeEvent e) {
JSlider source = (JSlider) e.getSource();
qualityLevel = source.getValue();
update();
}
});
sliderPanel.add(slider);
pane.add(sliderPanel, BorderLayout.PAGE_START);
JPanel imgPanel = new JPanel();
harrisImgLabel = new JLabel(new ImageIcon(img));
shiTomasiImgLabel = new JLabel(new ImageIcon(img));
imgPanel.add(harrisImgLabel);
imgPanel.add(shiTomasiImgLabel);
pane.add(imgPanel, BorderLayout.CENTER);
}
private void update() {
int qualityLevelVal = Math.max(qualityLevel, 1);
//Harris
harrisCopy = src.clone();
float[] McData = new float[(int) (Mc.total() * Mc.channels())];
Mc.get(0, 0, McData);
for (int i = 0; i < srcGray.rows(); i++) {
for (int j = 0; j < srcGray.cols(); j++) {
if (McData[i * srcGray.cols() + j] > harrisMinVal
+ (harrisMaxVal - harrisMinVal) * qualityLevelVal / MAX_QUALITY_LEVEL) {
Imgproc.circle(harrisCopy, new Point(j, i), 4,
new Scalar(rng.nextInt(256), rng.nextInt(256), rng.nextInt(256)), Imgproc.FILLED);
}
}
}
//Shi-Tomasi
shiTomasiCopy = src.clone();
float[] shiTomasiData = new float[(int) (shiTomasiDst.total() * shiTomasiDst.channels())];
shiTomasiDst.get(0, 0, shiTomasiData);
for (int i = 0; i < srcGray.rows(); i++) {
for (int j = 0; j < srcGray.cols(); j++) {
if (shiTomasiData[i * srcGray.cols() + j] > shiTomasiMinVal
+ (shiTomasiMaxVal - shiTomasiMinVal) * qualityLevelVal / MAX_QUALITY_LEVEL) {
Imgproc.circle(shiTomasiCopy, new Point(j, i), 4,
new Scalar(rng.nextInt(256), rng.nextInt(256), rng.nextInt(256)), Imgproc.FILLED);
}
}
}
harrisImgLabel.setIcon(new ImageIcon(HighGui.toBufferedImage(harrisCopy)));
shiTomasiImgLabel.setIcon(new ImageIcon(HighGui.toBufferedImage(shiTomasiCopy)));
frame.repaint();
}
}
public class CornerDetectorDemo {
public static void main(String[] args) {
// Load the native OpenCV library
System.loadLibrary(Core.NATIVE_LIBRARY_NAME);
// Schedule a job for the event dispatch thread:
// creating and showing this application's GUI.
javax.swing.SwingUtilities.invokeLater(new Runnable() {
@Override
public void run() {
new CornerDetector(args);
}
});
}
}
Python
This tutorial code's is shown lines below. You can also download it from here
from __future__ import print_function
import cv2 as cv
import numpy as np
import argparse
import random as rng
myHarris_window = 'My Harris corner detector'
myShiTomasi_window = 'My Shi Tomasi corner detector'
myHarris_qualityLevel = 50
myShiTomasi_qualityLevel = 50
max_qualityLevel = 100
rng.seed(12345)
def myHarris_function(val):
myHarris_copy = np.copy(src)
myHarris_qualityLevel = max(val, 1)
for i in range(src_gray.shape[0]):
for j in range(src_gray.shape[1]):
if Mc[i,j] > myHarris_minVal + ( myHarris_maxVal - myHarris_minVal )*myHarris_qualityLevel/max_qualityLevel:
cv.circle(myHarris_copy, (j,i), 4, (rng.randint(0,256), rng.randint(0,256), rng.randint(0,256)), cv.FILLED)
cv.imshow(myHarris_window, myHarris_copy)
def myShiTomasi_function(val):
myShiTomasi_copy = np.copy(src)
myShiTomasi_qualityLevel = max(val, 1)
for i in range(src_gray.shape[0]):
for j in range(src_gray.shape[1]):
if myShiTomasi_dst[i,j] > myShiTomasi_minVal + ( myShiTomasi_maxVal - myShiTomasi_minVal )*myShiTomasi_qualityLevel/max_qualityLevel:
cv.circle(myShiTomasi_copy, (j,i), 4, (rng.randint(0,256), rng.randint(0,256), rng.randint(0,256)), cv.FILLED)
cv.imshow(myShiTomasi_window, myShiTomasi_copy)
# Load source image and convert it to gray
parser = argparse.ArgumentParser(description='Code for Creating your own corner detector tutorial.')
parser.add_argument('--input', help='Path to input image.', default='building.jpg')
args = parser.parse_args()
src = cv.imread(cv.samples.findFile(args.input))
if src is None:
print('Could not open or find the image:', args.input)
exit(0)
src_gray = cv.cvtColor(src, cv.COLOR_BGR2GRAY)
# Set some parameters
blockSize = 3
apertureSize = 3
# My Harris matrix -- Using cornerEigenValsAndVecs
myHarris_dst = cv.cornerEigenValsAndVecs(src_gray, blockSize, apertureSize)
# calculate Mc
Mc = np.empty(src_gray.shape, dtype=np.float32)
for i in range(src_gray.shape[0]):
for j in range(src_gray.shape[1]):
lambda_1 = myHarris_dst[i,j,0]
lambda_2 = myHarris_dst[i,j,1]
Mc[i,j] = lambda_1*lambda_2 - 0.04*pow( ( lambda_1 + lambda_2 ), 2 )
myHarris_minVal, myHarris_maxVal, _, _ = cv.minMaxLoc(Mc)
# Create Window and Trackbar
cv.namedWindow(myHarris_window)
cv.createTrackbar('Quality Level:', myHarris_window, myHarris_qualityLevel, max_qualityLevel, myHarris_function)
myHarris_function(myHarris_qualityLevel)
# My Shi-Tomasi -- Using cornerMinEigenVal
myShiTomasi_dst = cv.cornerMinEigenVal(src_gray, blockSize, apertureSize)
myShiTomasi_minVal, myShiTomasi_maxVal, _, _ = cv.minMaxLoc(myShiTomasi_dst)
# Create Window and Trackbar
cv.namedWindow(myShiTomasi_window)
cv.createTrackbar('Quality Level:', myShiTomasi_window, myShiTomasi_qualityLevel, max_qualityLevel, myShiTomasi_function)
myShiTomasi_function(myShiTomasi_qualityLevel)
void minMaxLoc(InputArray src, double *minVal, double *maxVal=0, Point *minLoc=0, Point *maxLoc=0, InputArray mask=noArray())
Finds the global minimum and maximum in an array.
cv::String findFile(const cv::String &relative_path, bool required=true, bool silentMode=false)
Try to find requested data file.
int createTrackbar(const String &trackbarname, const String &winname, int *value, int count, TrackbarCallback onChange=0, void *userdata=0)
Creates a trackbar and attaches it to the specified window.
CV_EXPORTS_W Mat imread(const String &filename, int flags=IMREAD_COLOR)
Loads an image from a file.
void cvtColor(InputArray src, OutputArray dst, int code, int dstCn=0)
Converts an image from one color space to another.
void circle(InputOutputArray img, Point center, int radius, const Scalar &color, int thickness=1, int lineType=LINE_8, int shift=0)
Draws a circle.
void cornerMinEigenVal(InputArray src, OutputArray dst, int blockSize, int ksize=3, int borderType=BORDER_DEFAULT)
Calculates the minimal eigenvalue of gradient matrices for corner detection.
void cornerEigenValsAndVecs(InputArray src, OutputArray dst, int blockSize, int ksize, int borderType=BORDER_DEFAULT)
Calculates eigenvalues and eigenvectors of image blocks for corner detection.
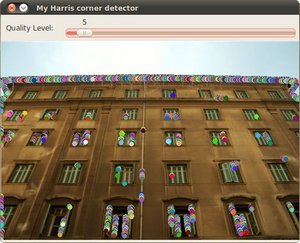
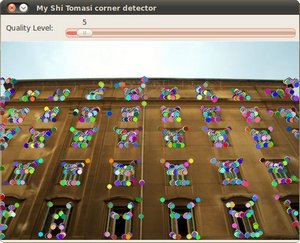
Explanation
Result